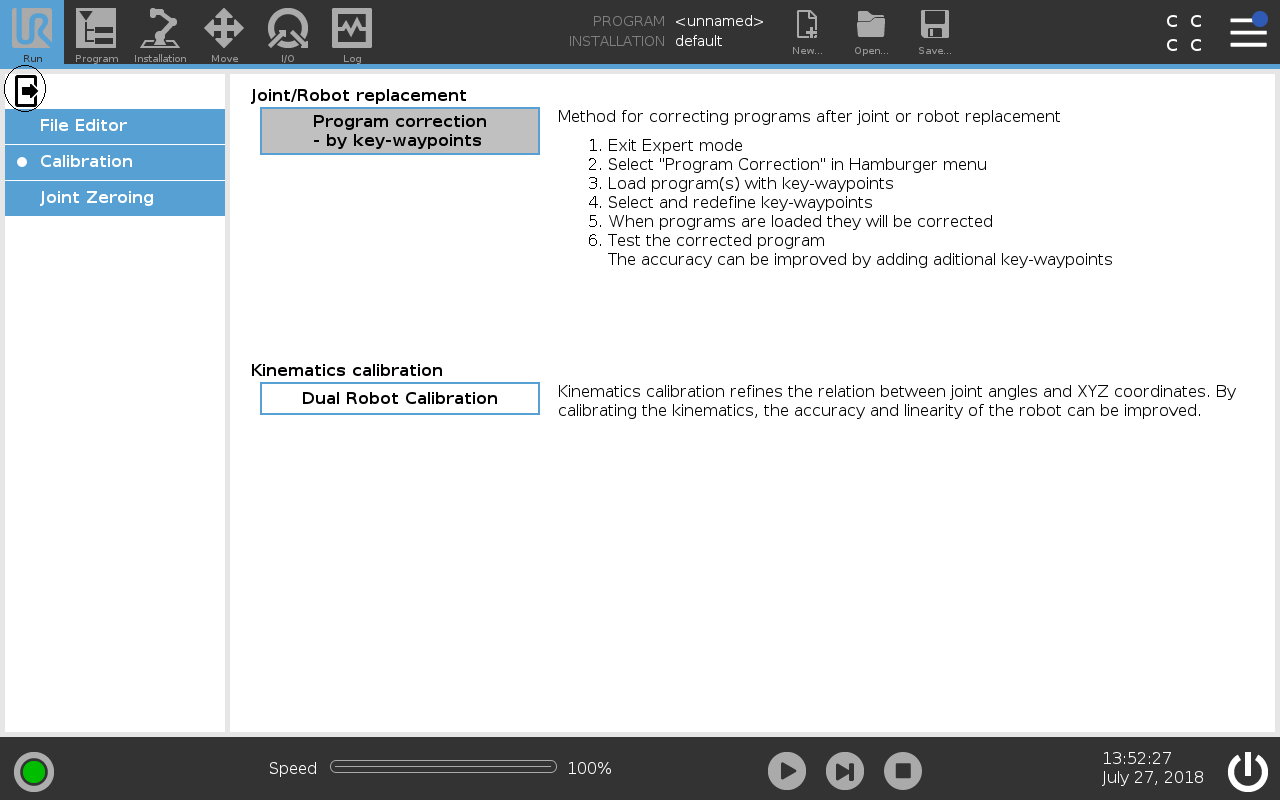
Method 1: Manual Connection
| Description |
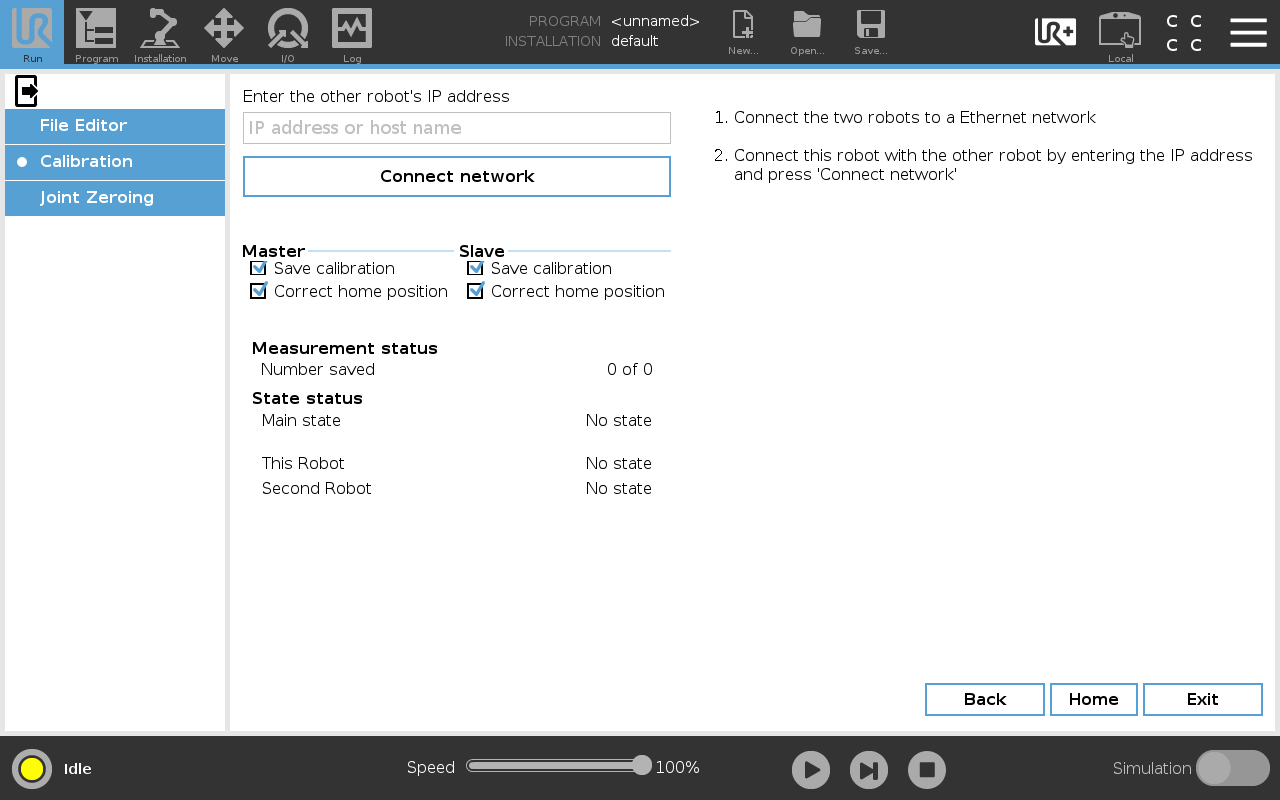
Use this method when the robots are already connected to a local area network. Connecting the robots to a Local Area Network (LAN) can interfere with other devices sharing these IP addresses.
Connection between the two networks can break down, causing the calibration screen to change.
|
| Connecting the Manual network (Method 1) |
Define the network connection types as listed in the following table:
|
||||||||
| To connect the Manual network |
|