How to Mount Robot Arms to the Calibration Horse
| Description |
When you mount the arms for calibration, keep the following in mind:
|
| To mount each robot arm in SW |
|
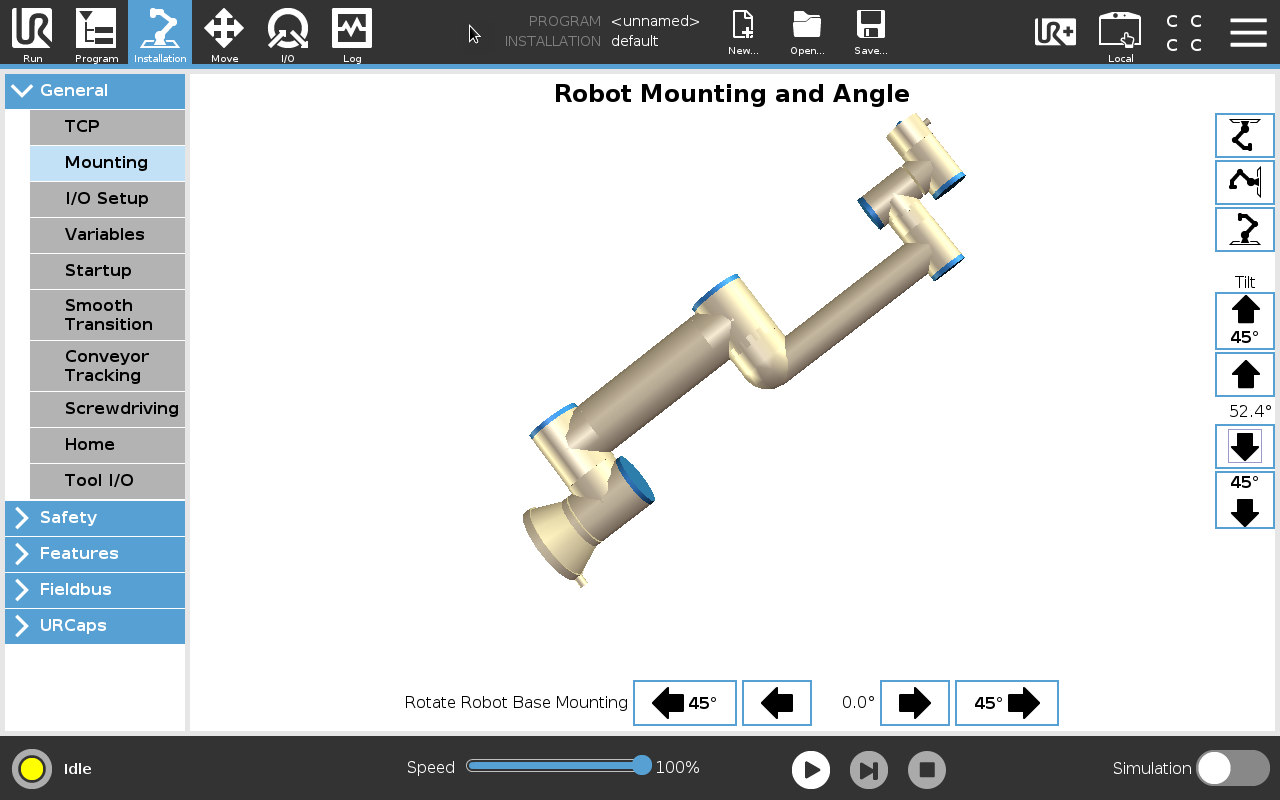
| To configure the mounting software |
Use the following numbers for your robot:
|