TCP Position
| Description |
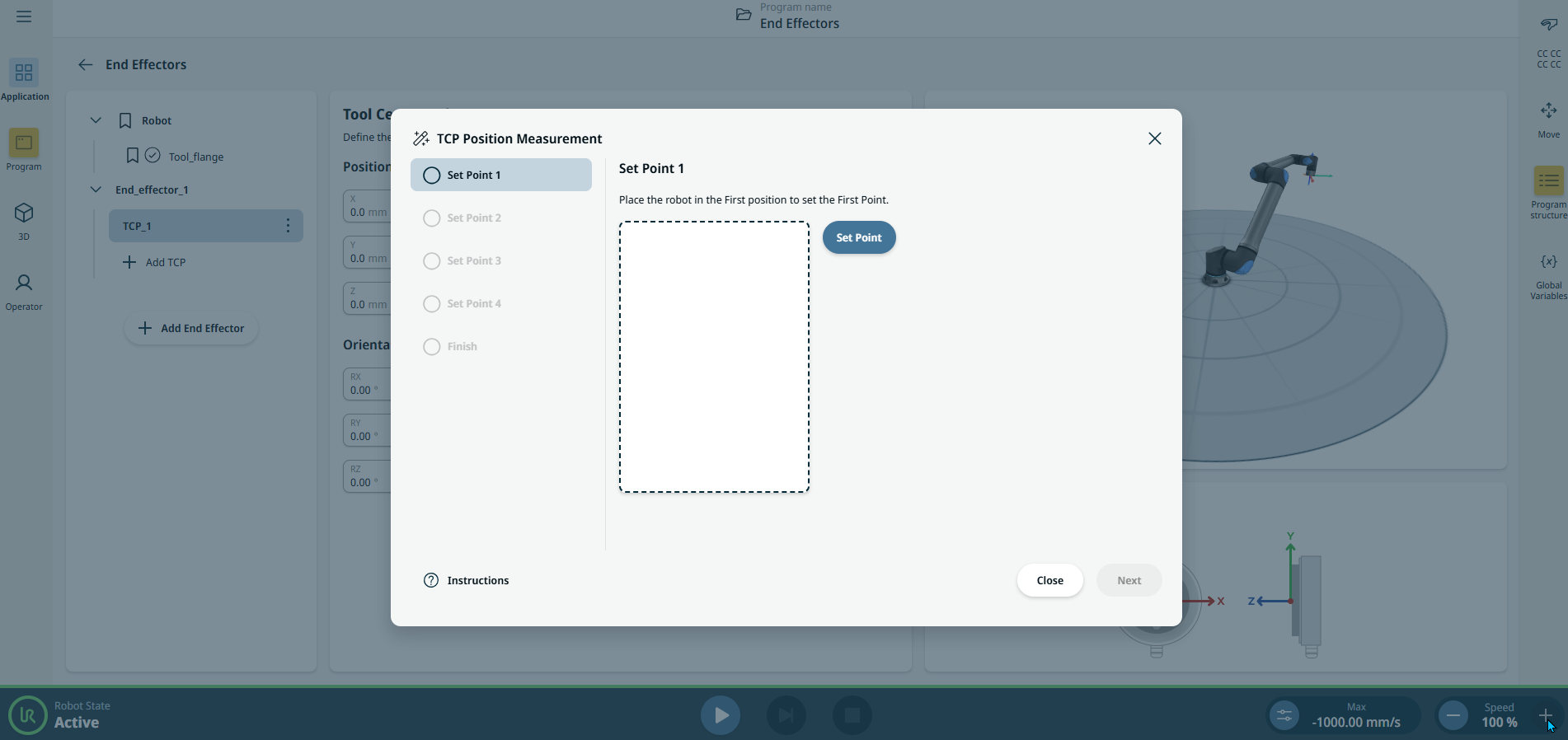
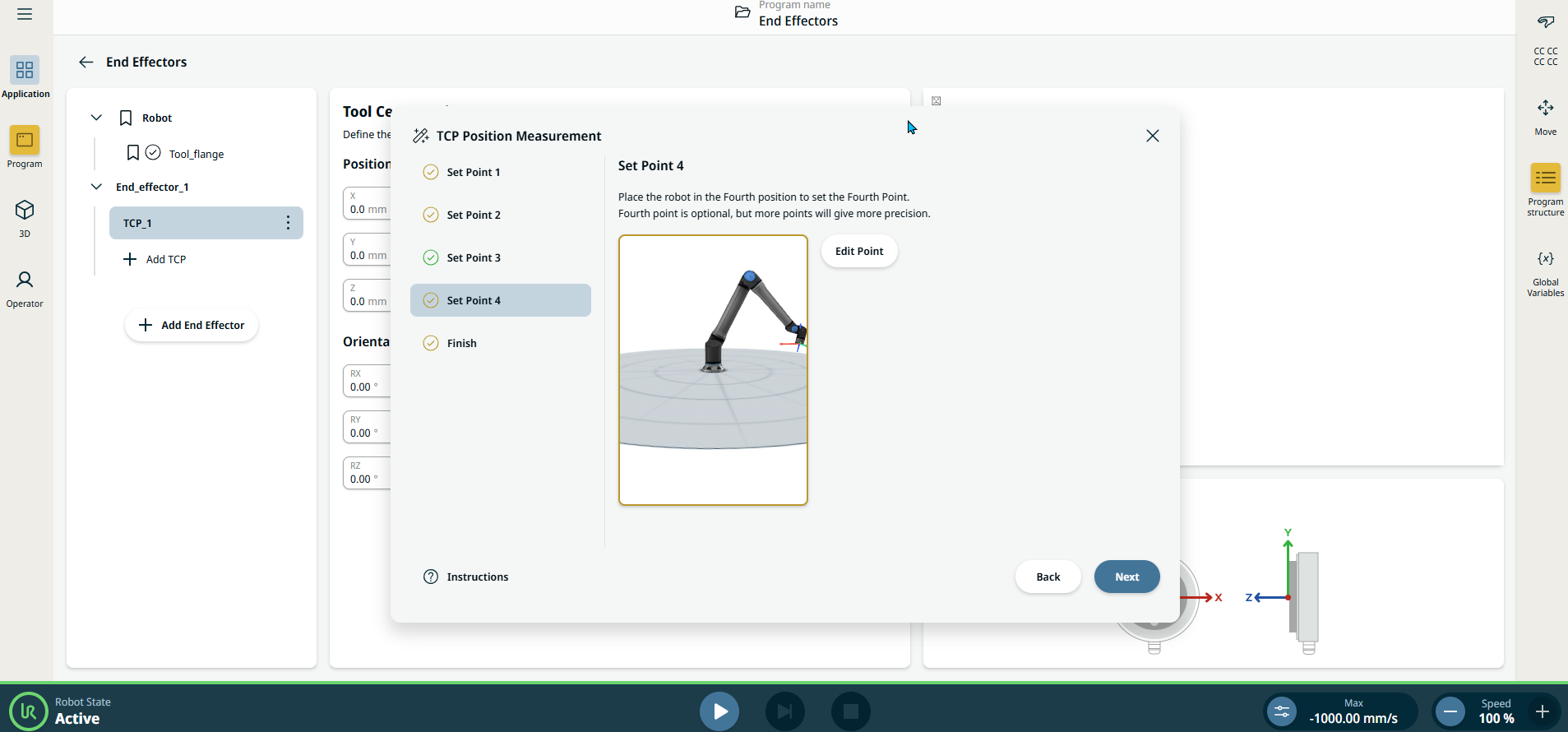
The TCP position wizard assists user in finding the position (translation) of a TCP. This is useful in situations where the position is unknown and cannot be easily measured.
|
|
TCP Position wizard |
|
|
|
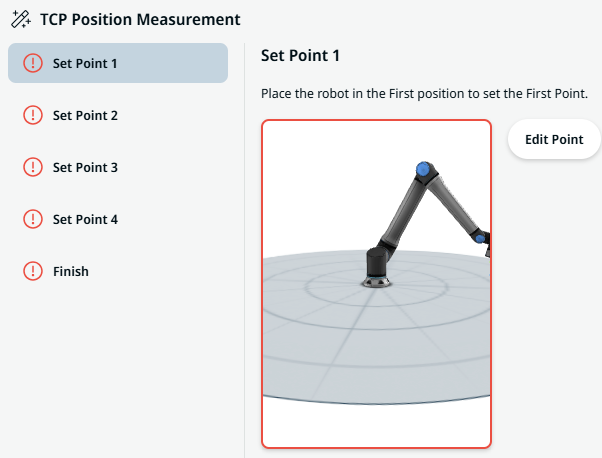
A red warning in Set Points informs user if the taught positions are not sufficiently diverse, in which case it is not possible to compute the TCP position. This means that the positions must be retaught.
|