Seek using force
Using force to detect an object
Examples are valid for:
CB2 Software version: 1.8.16941
CB3 Software version: 3.1.17779
Note that older or newer software versions may behave differently.
These examples can be used for both CB2 and for CB3.
|
Note: For CB3 robots (produced after 25/7 2012) typical tolerances are:
Robots produced before 25/7 2012, they may be less accurate in force-mode. Force control is only available for UR5 and UR10 with software 1.6 or later. |
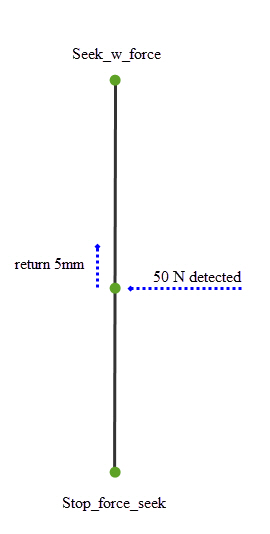
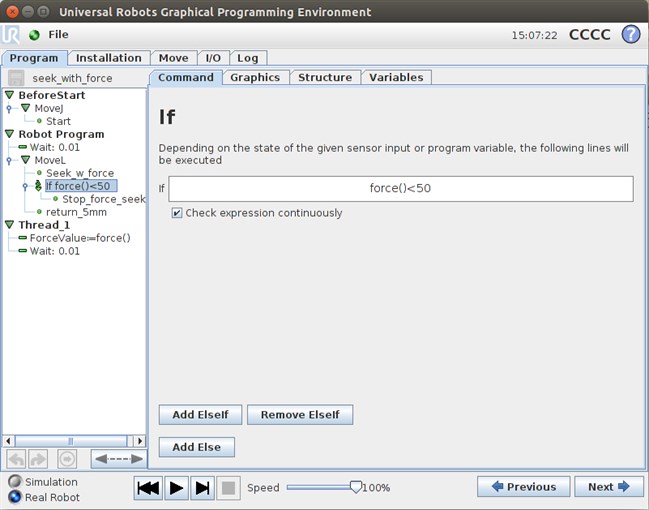
The example shows how to use the force() to detect and object and move 5mm back in the Z direction.
It is important to tick "Check expression continuously" in order to use the force detection in it's full travel.
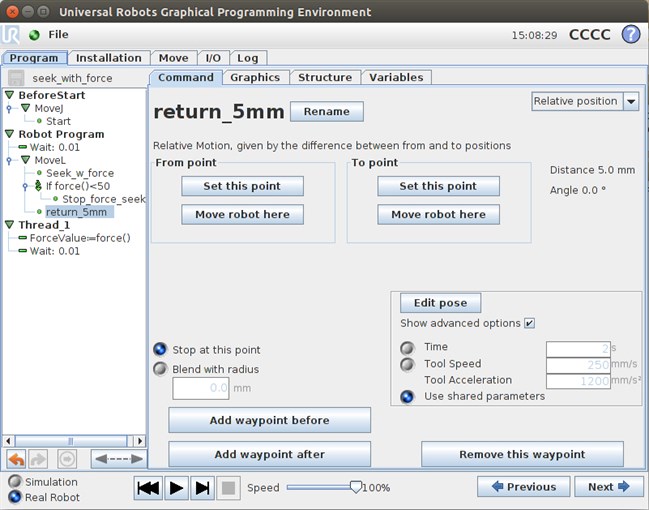
When the object is detected we use a relative waypoint to move 5mm back in the Z direction.
Here is a small drawing showing how it works.