| 使用 IMMI 模板
|
- 在 PolyScope 的標題中,按一下「程式」並選擇 IMMI。
- Select Template for the program screen to appear with the template
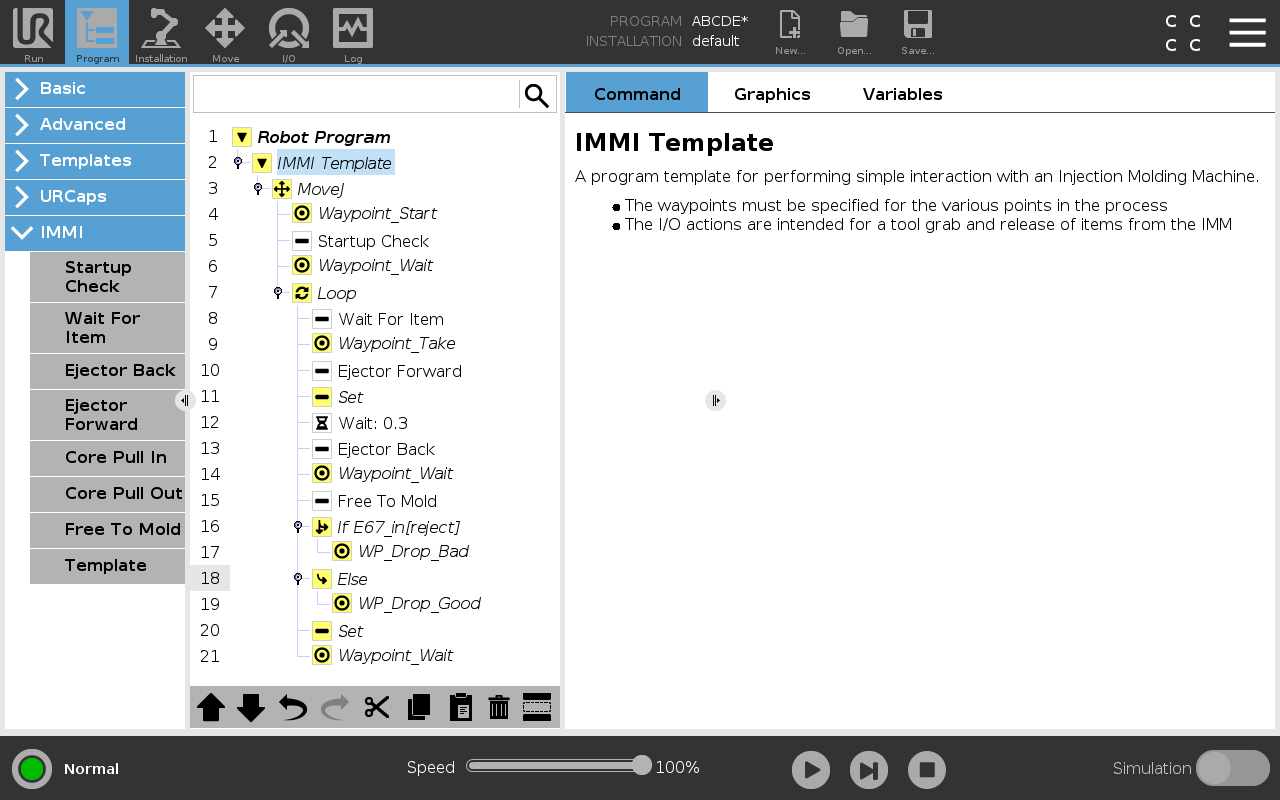
loaded. 模板架構顯示於螢幕左方,如下方所示。
- 若要準備好讓機器人處理物件,請從下列選項中選出所需的路點:
- 路點開始:注塑過程開始之前的機器人手臂起點。
- 路點等待:機器人手臂等待點。
- 路點獲取:機器人手臂從 IMM 點取下工件。
- 路點放下不良:機器人手臂釋放遭拒的工件點。
- 路點放下良好:機器人手臂釋放獲得接受的工件點。
- 選擇並自訂以下節點之一來控制夾爪:
- 設定:確認工具何時夾緊和鬆開工件。
- 循環:僅在必須從 IMM 中取下工件時才運行機器人。
- MoveJ:調整機器人移動速度以適應 IMM 的工作週期時間。
- 在「移動」節點中,調整「聯合速度」和「聯合加速度」,以適應工件的脆弱性。
|