E/A-Ebenen
| Beschreibung |
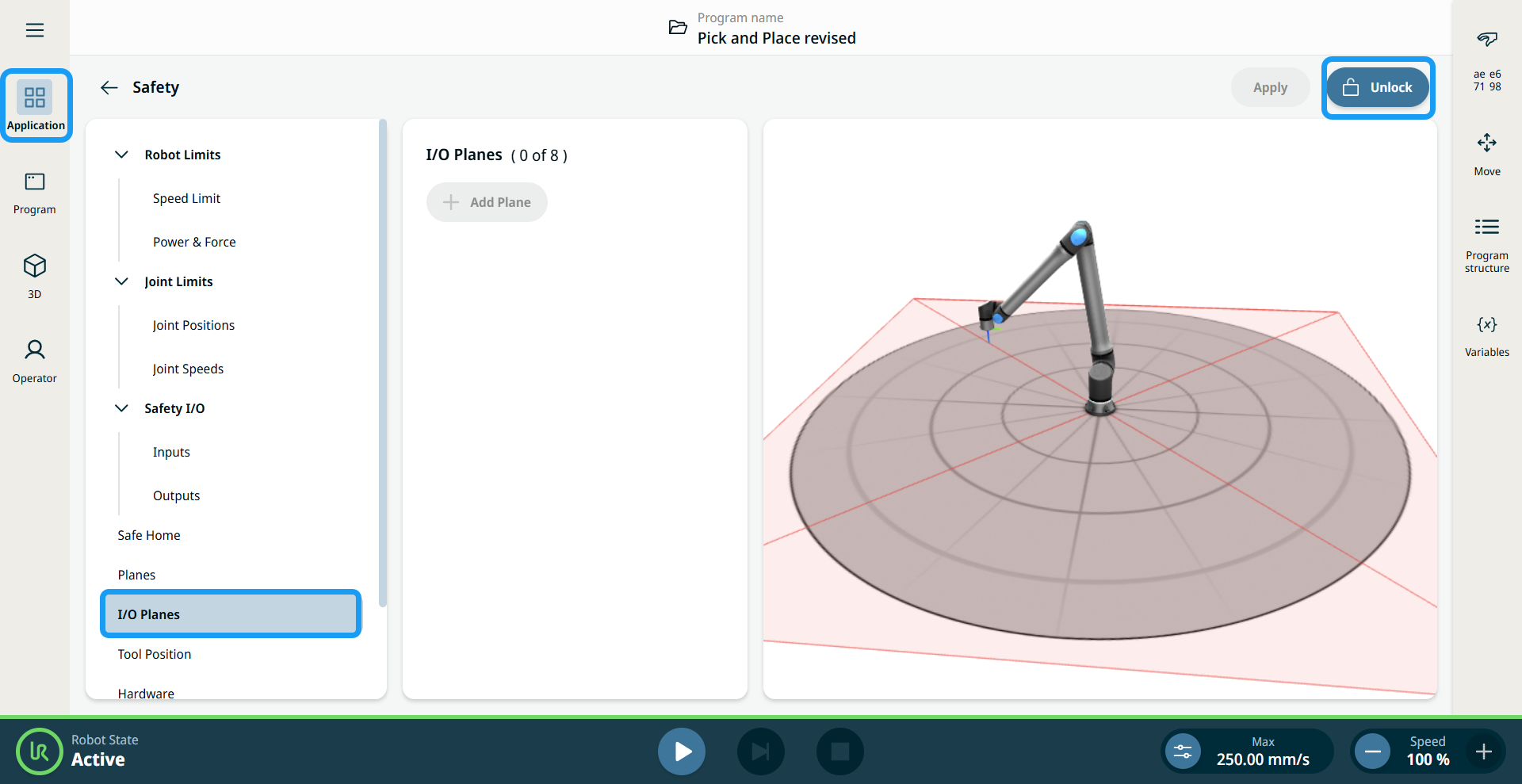
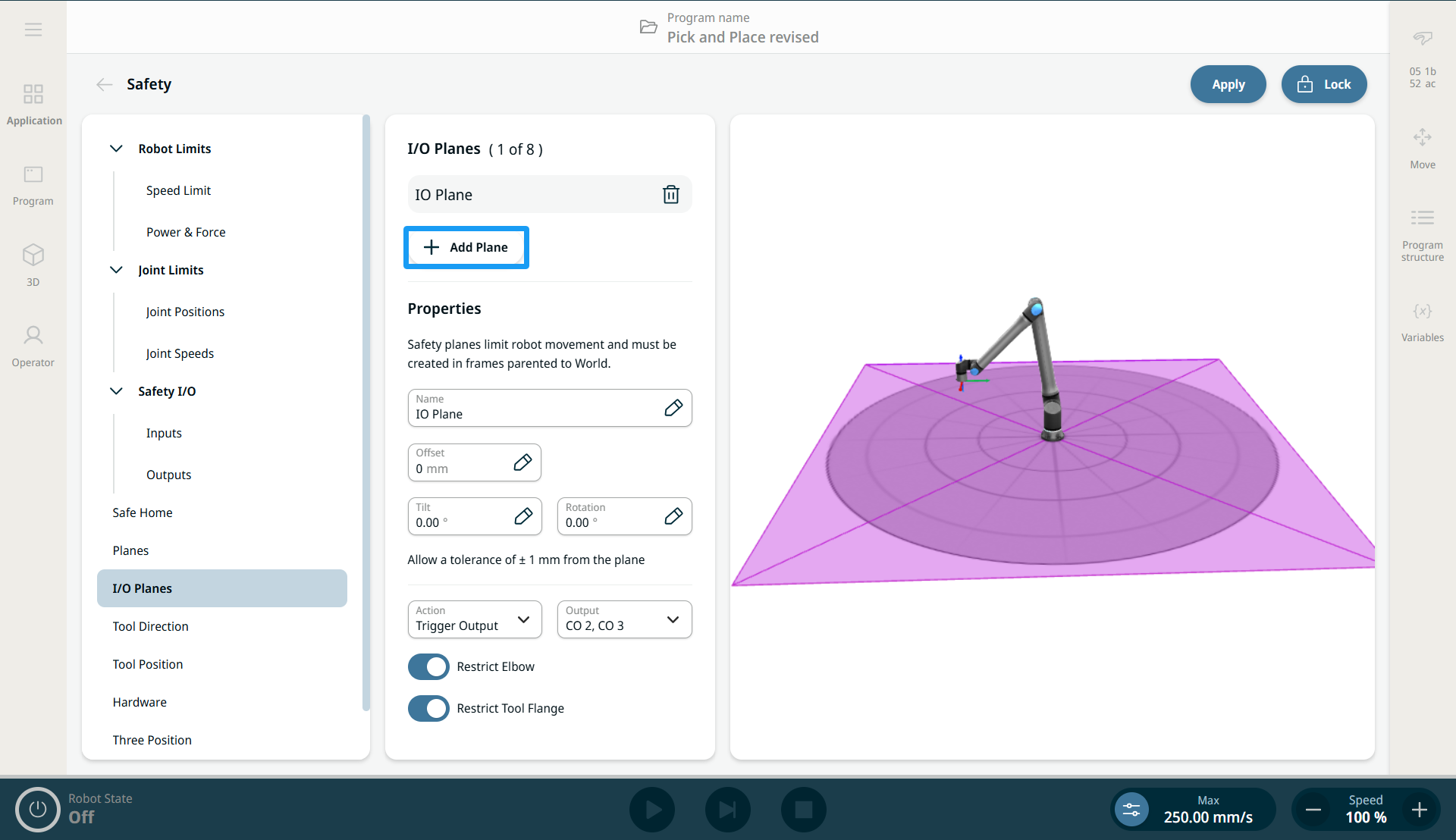
Die Funktion E/A-Ebenen bietet eine flexiblere Verwendung von Sicherheitsebenen im Vergleich zum Standard Sicherheitsebenen Funktionalität. Damit können Sie Sicherheitsebenen über Klemmeneingänge aktivieren und deaktivieren und/oder ein Ausgangssignal erzeugen, wenn die Sicherheitskugeln eine Sicherheitsebene überqueren.
|
|
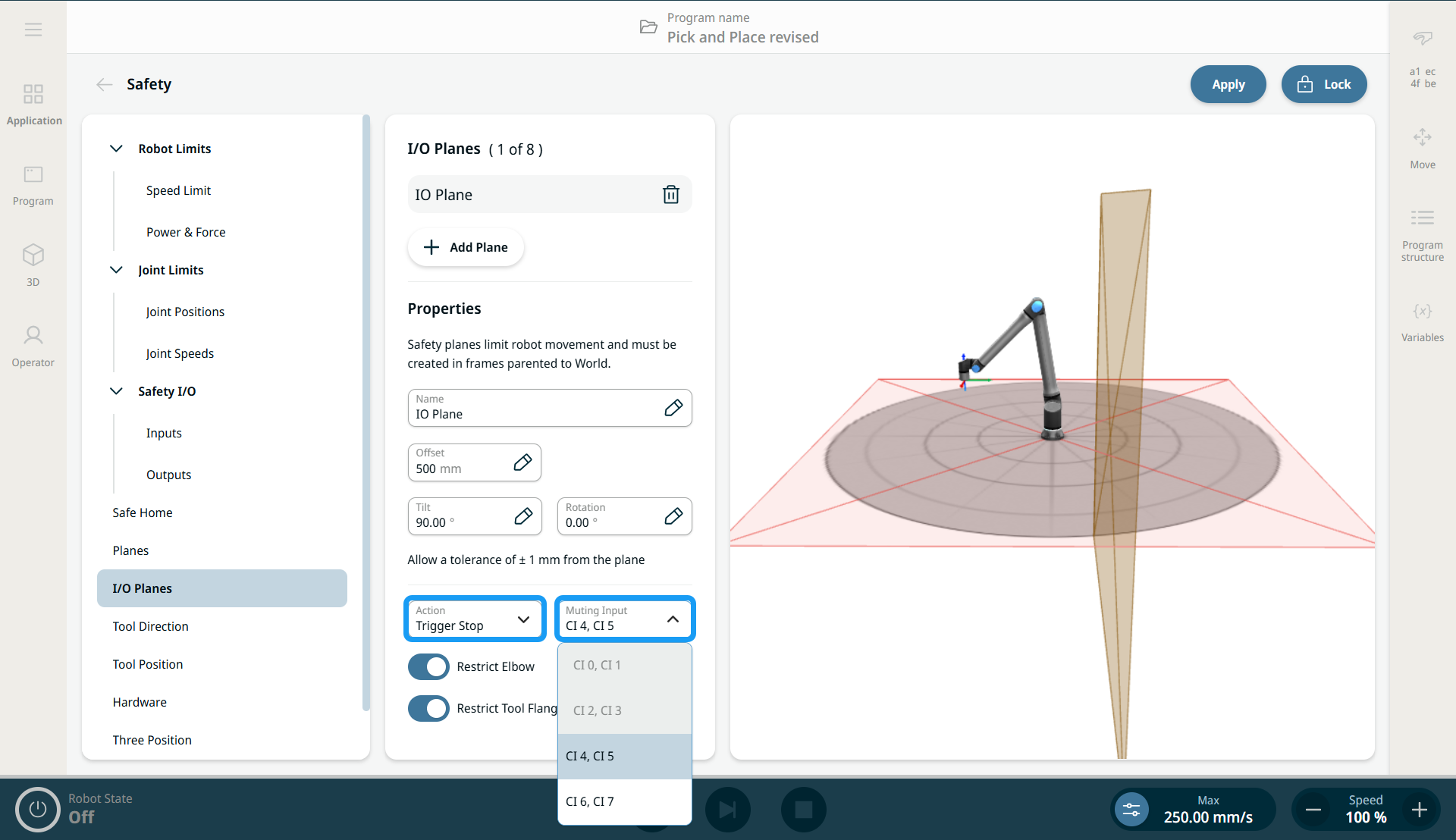
Eingabe-/Stopp-Ebene |
Trigger Stop löst den Stopp einer E/A-Ebene aus. Sie kann über einen Sicherheitseingang stummgeschaltet werden. Wenn das Flugzeug nicht stummgeschaltet ist, hält der Roboter an und wartet, bis der Sicherheitseingang das Flugzeug stummschaltet. Wenn die Ebene inaktiv ist, kann sich der Roboter frei bewegen. Wenn die Ebene aktiv ist und der Roboter die Ebene noch nicht überquert hat, hält der Roboter an, bevor er die Ebene überquert. Wenn die Ebene aktiviert wird, während sich der Roboter am Rand der Ebene bewegt, kann der Roboter die Ebene überqueren und wird im schlimmsten Fall entsprechend den konfigurierten Abstandsund Anhaltezeitgrenzen anhalten. Wenn die Ebene aktiviert ist und der Roboter die Ebene überquert hat, hält der Roboter entsprechend den konfigurierten Grenzen für den Anhalteweg und die Anhaltezeit an.
|
|
|
|
|
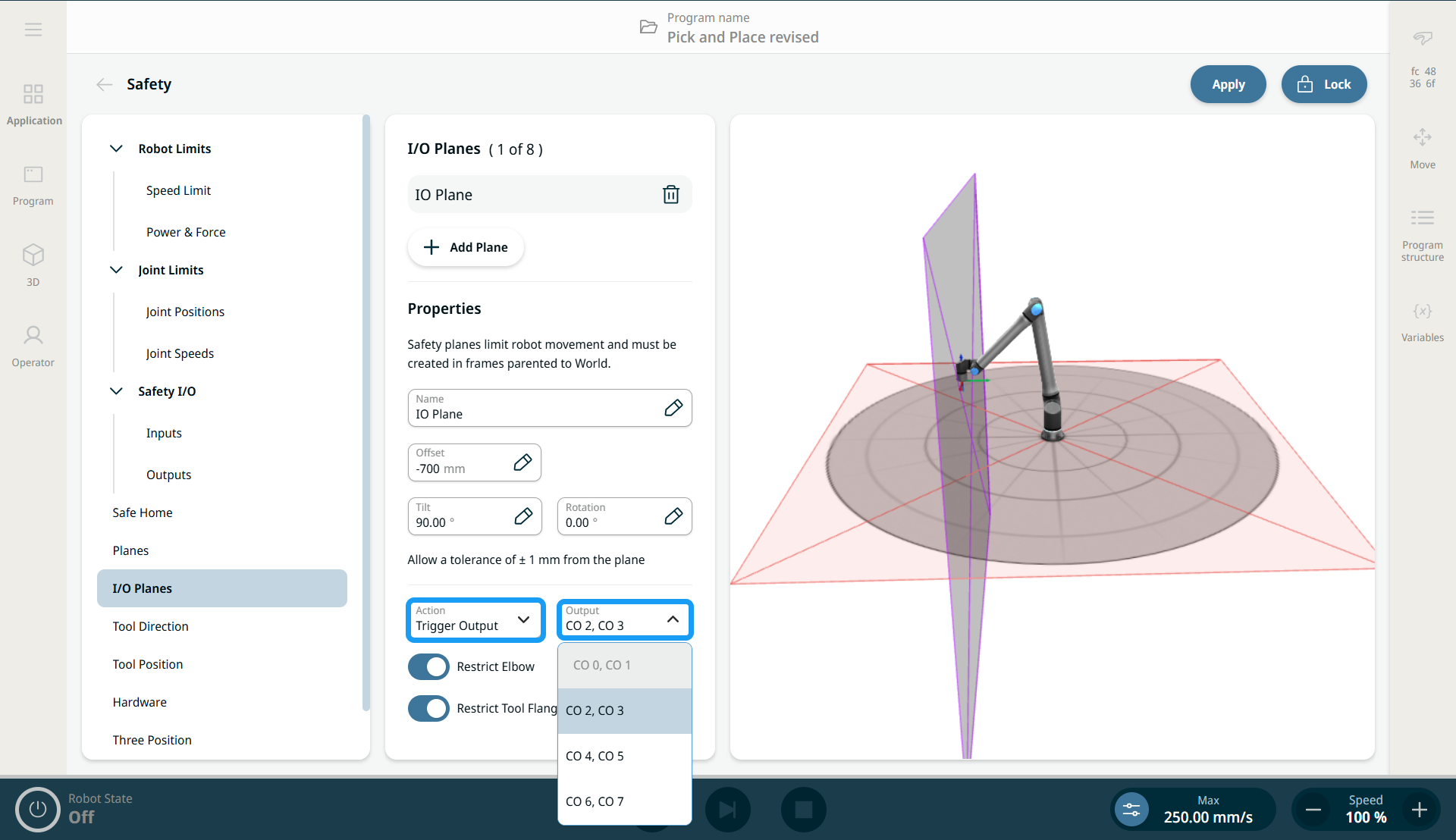
Ausgangsebene |
Der Triggerausgang erzeugt einen Sicherheitsausgang, je nachdem, ob eine oder mehrere Sicherheitskugeln die Ebene durchquert haben. Wenn eine oder mehrere der Sicherheitskugeln eine als Triggerausgang definierte Ebene überschritten haben, wird der dieser Ebene entsprechende Sicherheitsausgang aktiviert. "Aktiviert" bedeutet, dass die Sicherheitsausgänge elektrisch auf "Low" gesetzt sind. Wenn eine der Sicherheitskugeln eine als Triggerausgang definierte Ebene durchquert hat, wird der dieser Ebene entsprechende Sicherheitsausgang aktiviert.
|