Sicheres Zuhause
| Beschreibung |
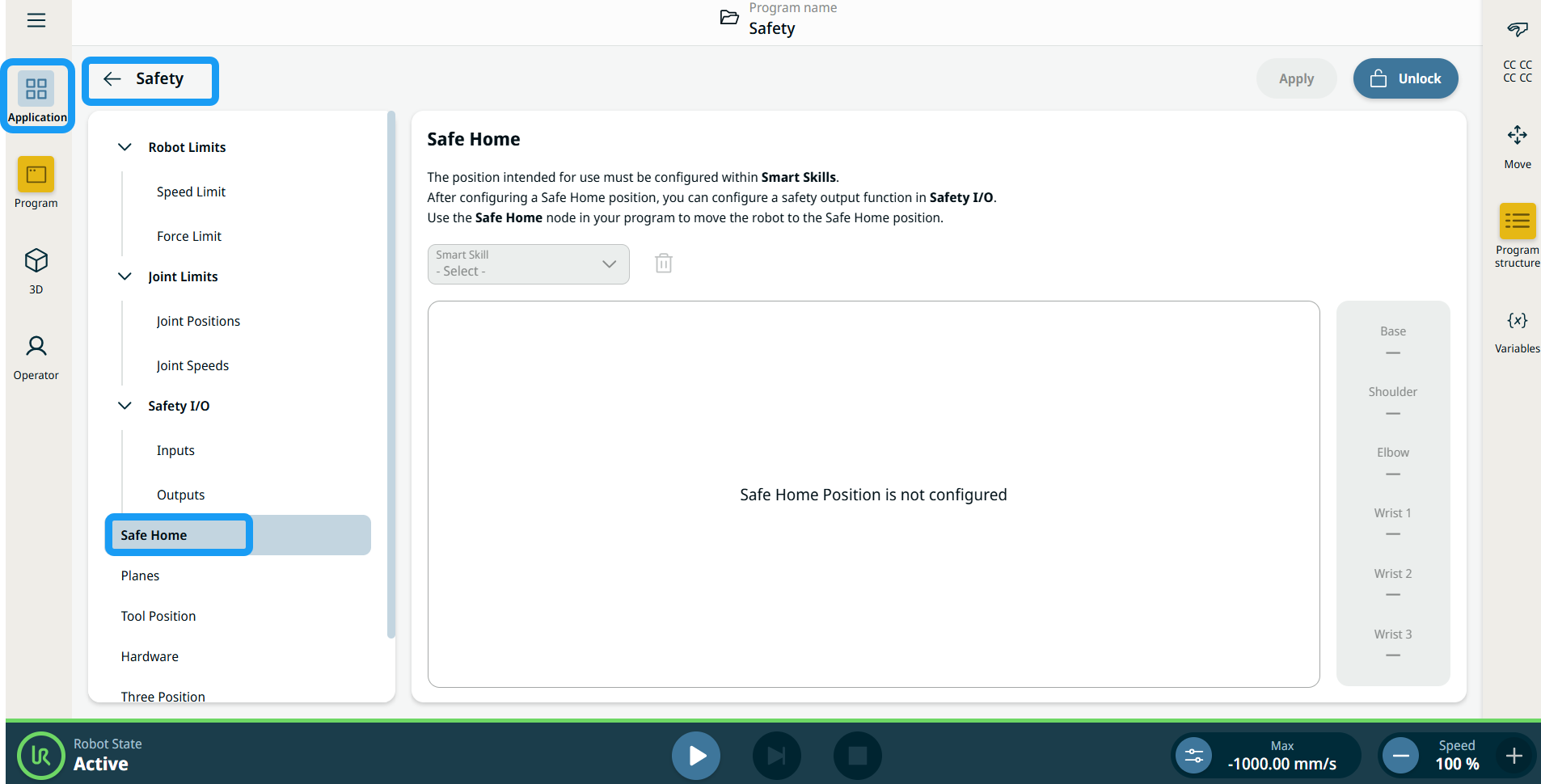
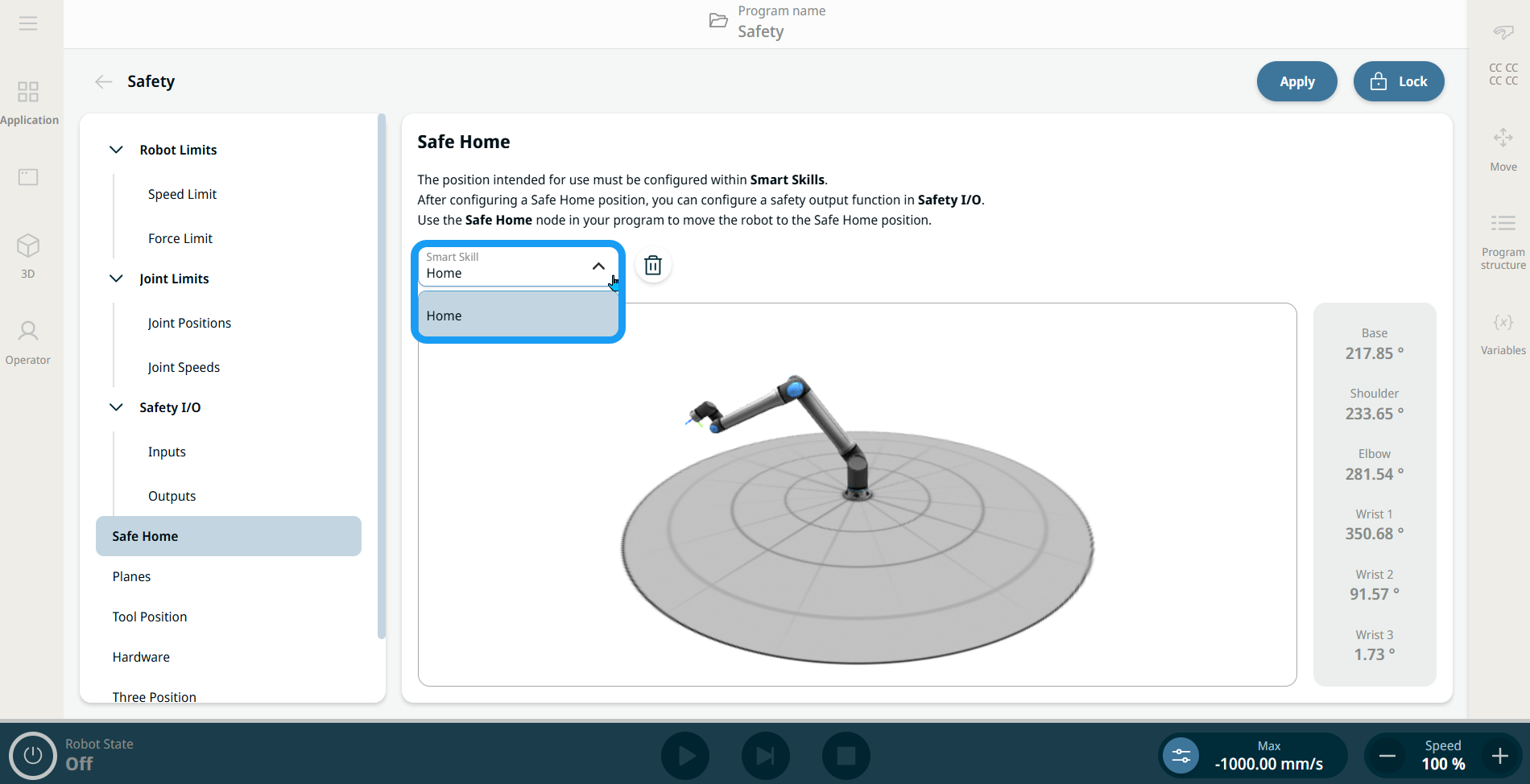
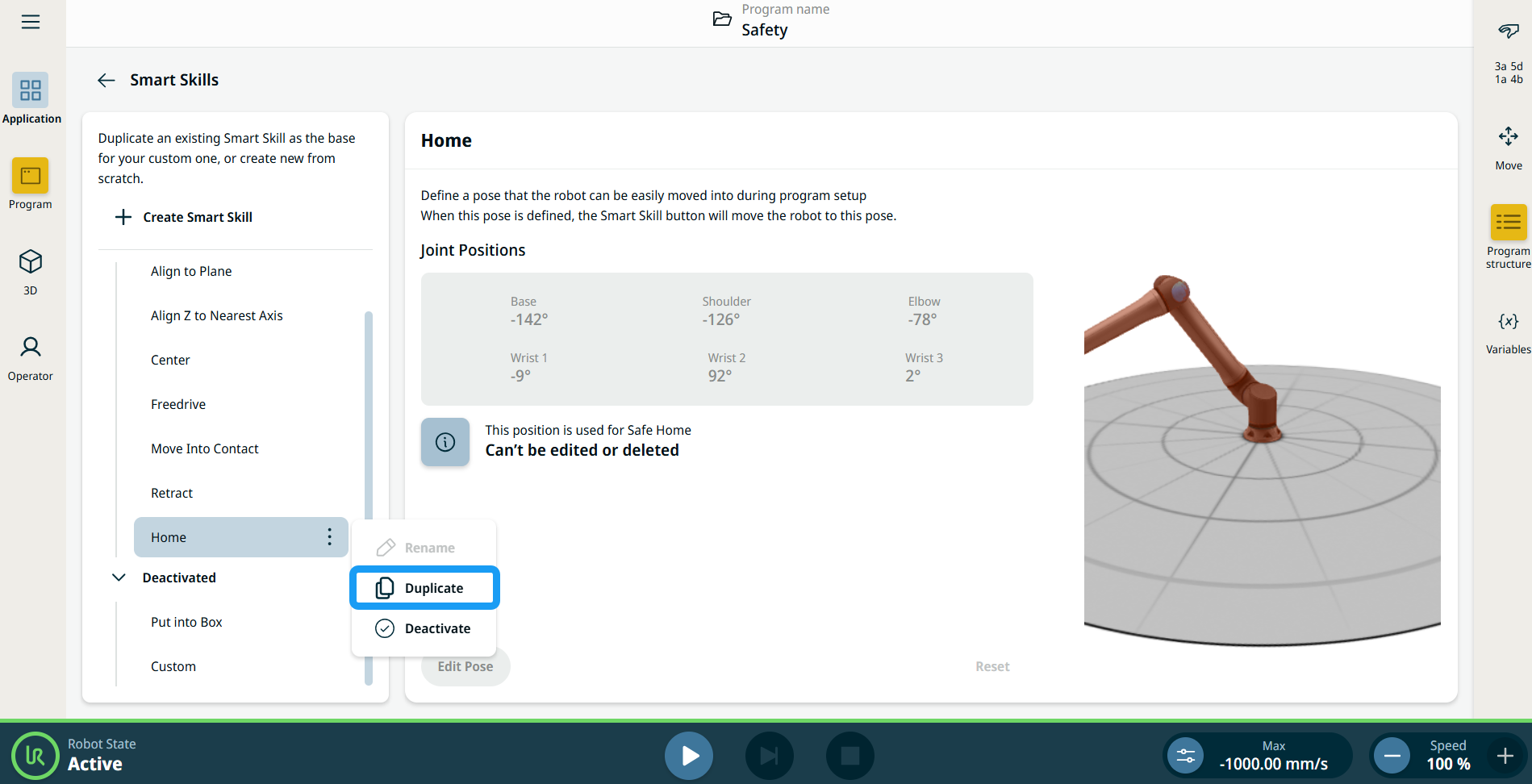
Sicheres Home ist eine PolyScope X Funktion, welche es Benutzern erlaubt, einen sicherheitsrelevanten Ausgang zu definieren, wenn der Roboter die konfigurierte sichere Home-Position erreicht. Der Benutzer wählt Home aus dem Dropdown der verfügbaren Smart Skill Positionen aus, welche als Referenz für die sichere Home-Position definiert werden können.
|
|
Auf sicheres Home zugreifen |
|
|
|
|
|
|
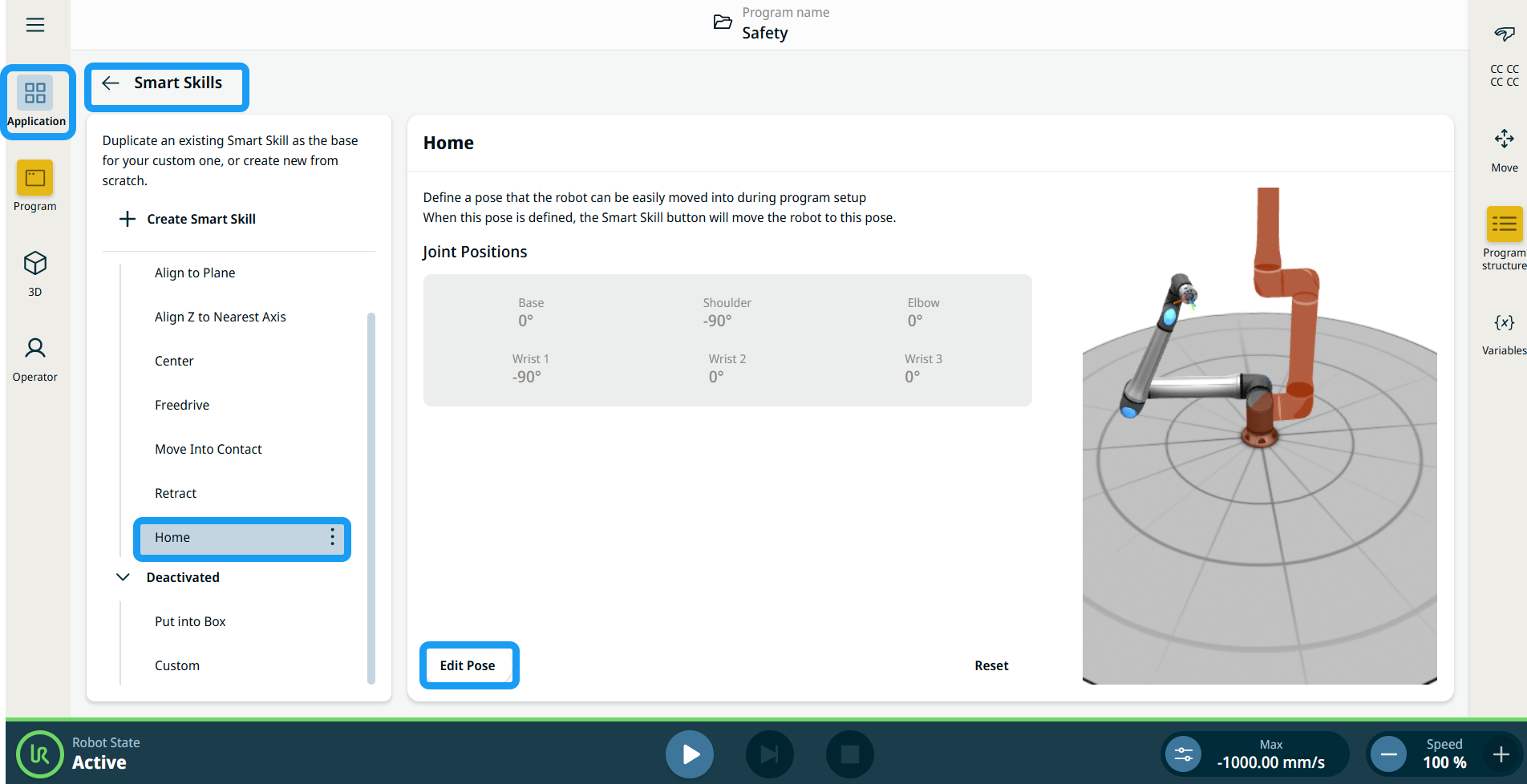
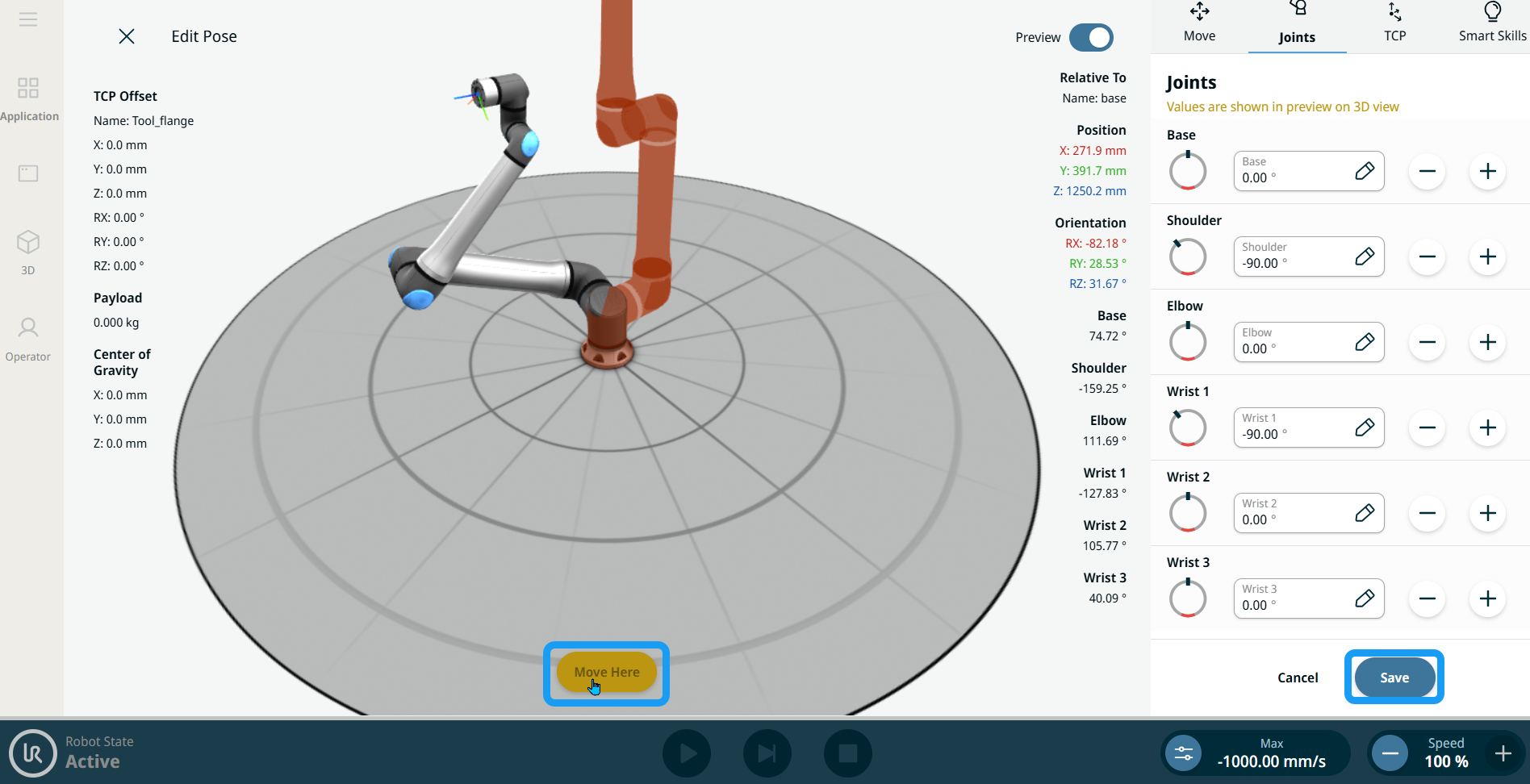
Falls der Position Smart Skill als Positionsreferenz für Sichere Home ausgewählt wurde:
|
|
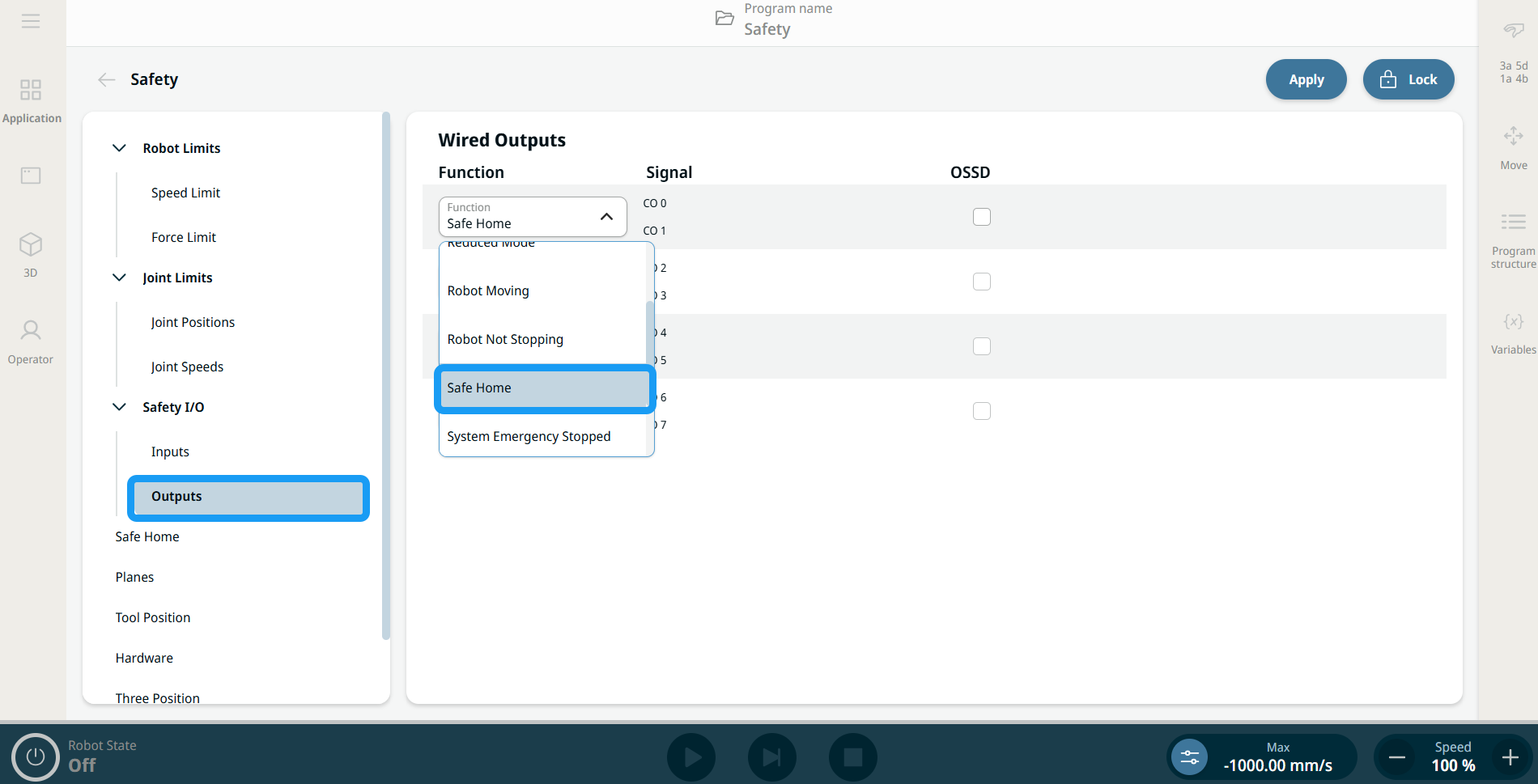
Sichere Home-Funktion in Ausgängen |
Falls die Home-Position zu einem Positions-Smart-Skill in Sicherheit zugewiesen, die Dropdown Liste für die Sicherheitsausgangsfunktionen enthält Sichere Heimposition als neue Funktionszuweisung. Wählen Sie Sichere Home in den Funktionsfeldern in Ausgänge der Sicherheits-E/A aus.
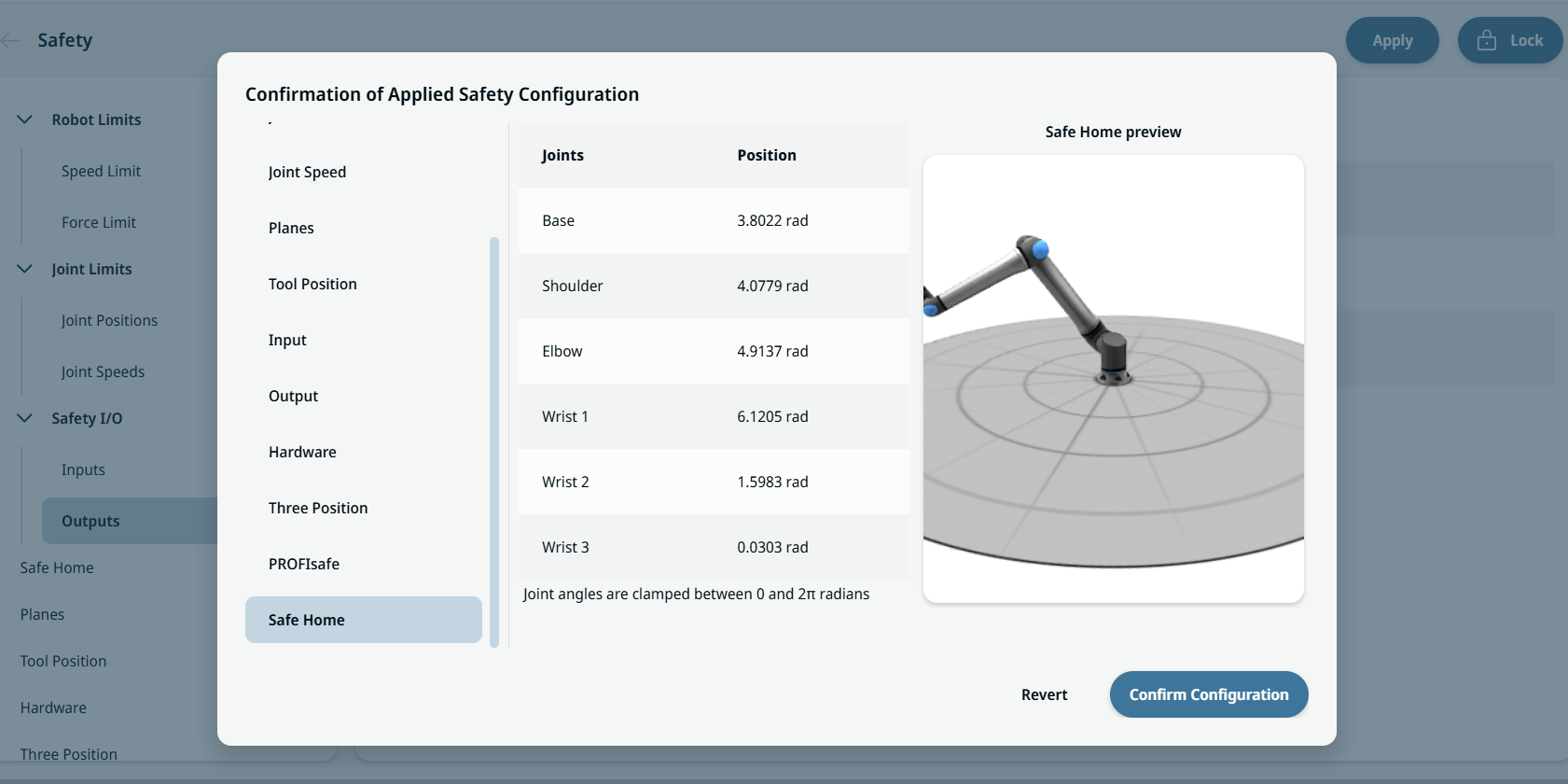
Sichere Home ist in der Tabelle der Funktionszuweisung bei dem Bestätigung der anzuwendenden Sicherheitskonfiguration Übersichtsdialog sichtbar.
|
|
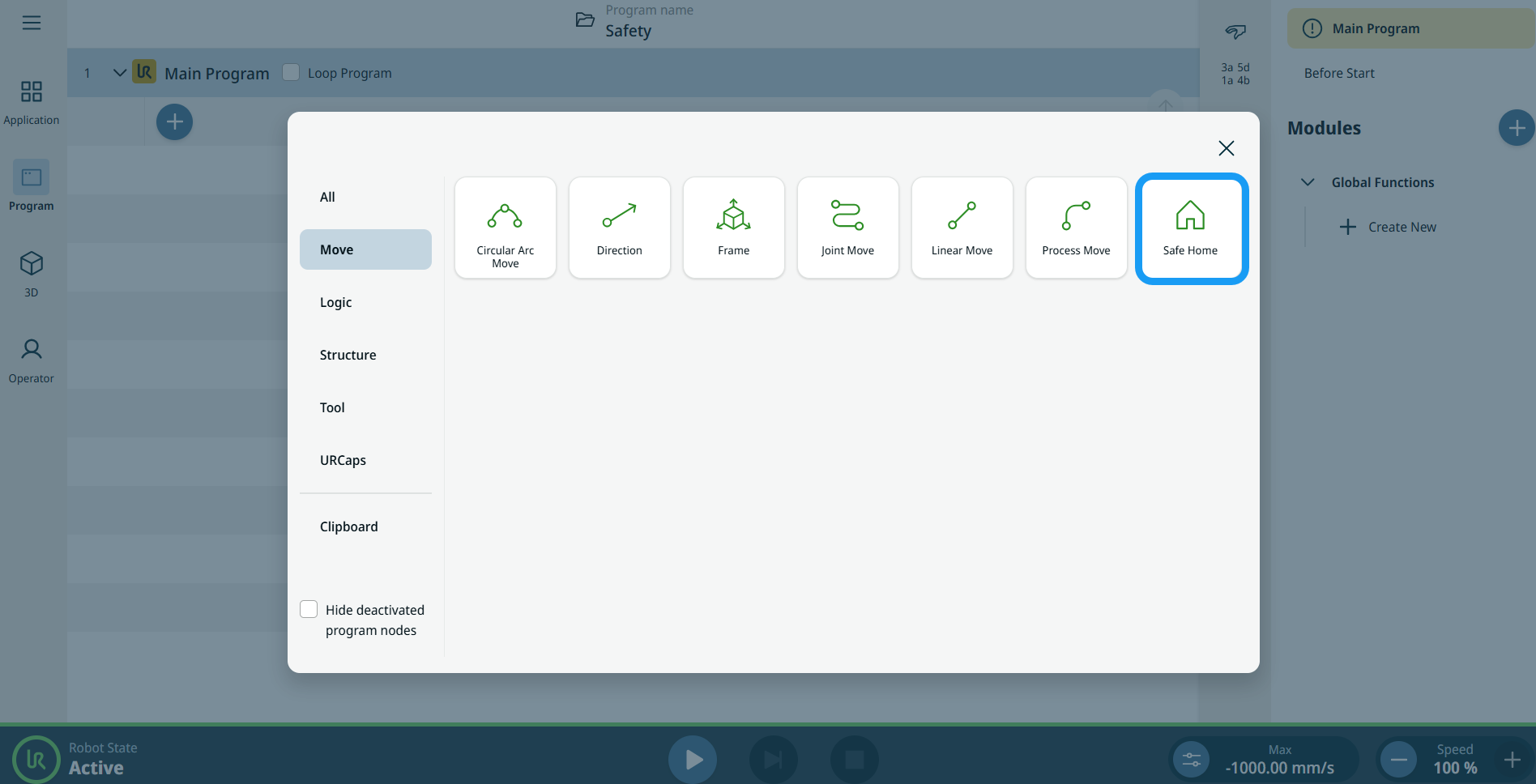
Sichere Home als Programmknoten |
Der Sichere Home Programmknoten befindet sich unter der Kategorie Bewegungsknoten innerhalb der Befehlsknoten. Der Knoten wird verwendet, um den Roboter zu befehlen, sich zu seiner vordefinierten sicheren Home-Position zu bewegen, wie in den Einstellungen für Sicherheitsanwendungen für sichere Home definiert.
Das Hinzufügen des Knotens, ohne dass eine sichere Home-Position in Sicherheit konfiguriert wurde, markiert den Knoten gelb.

Der sichere Home Befehlsknoten hat Bewegungsprofiloptionen und andere erweiterte Einstellungen, wenn das Ellipsen-Symbol,
|
 angetippt wird.
angetippt wird.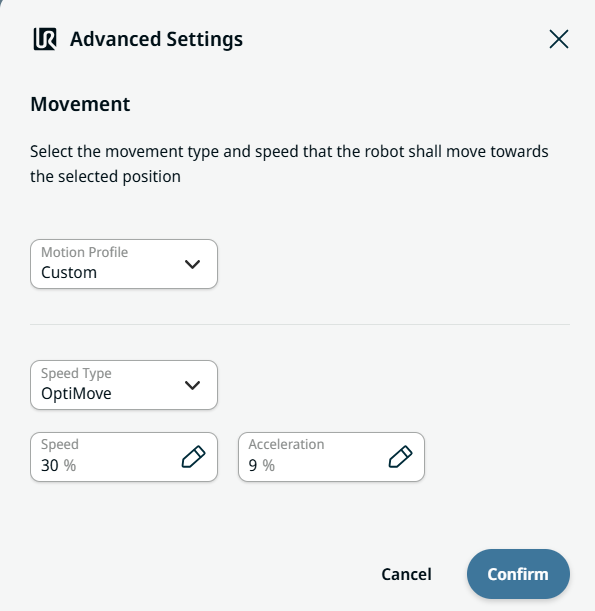
| Erweiterte Einstellungen |
Benutzer können Bewegungsprofile in den erweiterten Einstellungen mit den zwei Tabs und den zwei Feldern erstellen:
Bewegungsprofil ist eine Funktion, welches es Benutzern erlaubt, vordefinierte Bewegungsprofile in Bewegungsknoten einzustellen: Gelenkbewegung, Lineare Bewegung, Kreisbogenbewegung, Prozessbewegung und Richtung. Ein benutzerdefiniertes Bewegungsprofil ermöglicht es Benutzern, Bewegungsdaten in einem Bewegungsknoten zu definieren. Im Feld Geschwindigkeitstyp ist OptiMove die Standardeinstellung. Wählen Sie die Bewegungsart „ “ oder „Classic“ ( ), wenn Sie Geschwindigkeit und Beschleunigung in Grad pro Sekunde oder Millimeter pro Sekunde eingeben möchten. OptiMove-Einstellungen werden in Prozent angegeben, um die Nutzung und Einrichtung zu vereinfachen. Benutzer können den Prozentsatz der bevorzugten Geschwindigkeit im Geschwindigkeitstab einstellen, welcher die Zielfahrgeschwindigkeit als Prozentsatz der maximal möglichen Geschwindigkeit des Roboters festlegt. Benutzer können den Prozentsatz der gewünschten Beschleunigung im Beschleunigungstab einstellen, welche die Zieldrehmomentbegrenzung während der Be- und Entschleunigung als Prozentsatz der maximalen Leistung des Roboters festlegt.
|