Einschränkung der Werkzeugposition
| Einzelheiten |
Werkzeugposition hat zwei wichtige Vorteile:
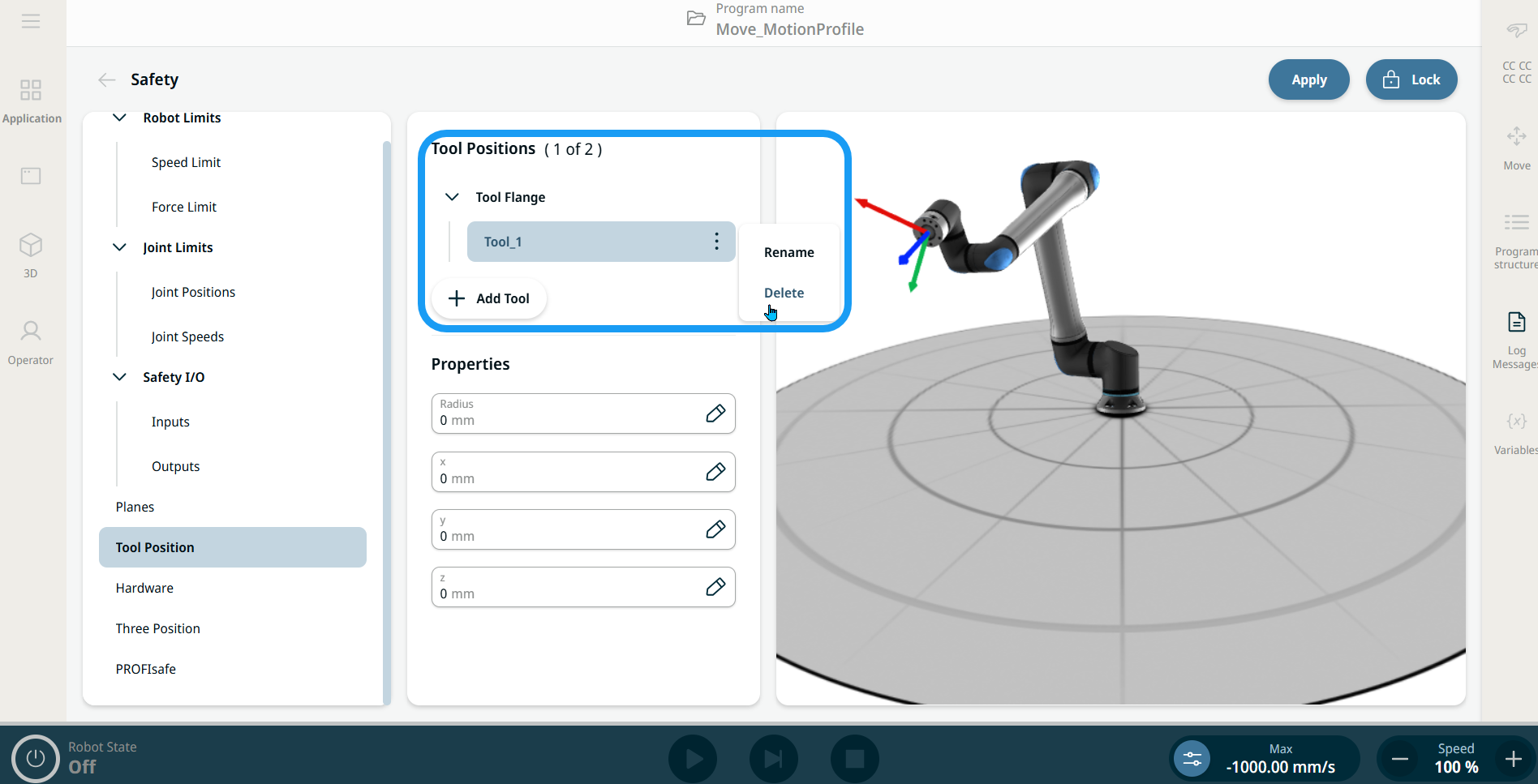
Sie können bis zu zwei Werkzeugpositionen definieren, konfigurieren und verwalten.
|
| Benutzerdefinierte Werkzeuge |
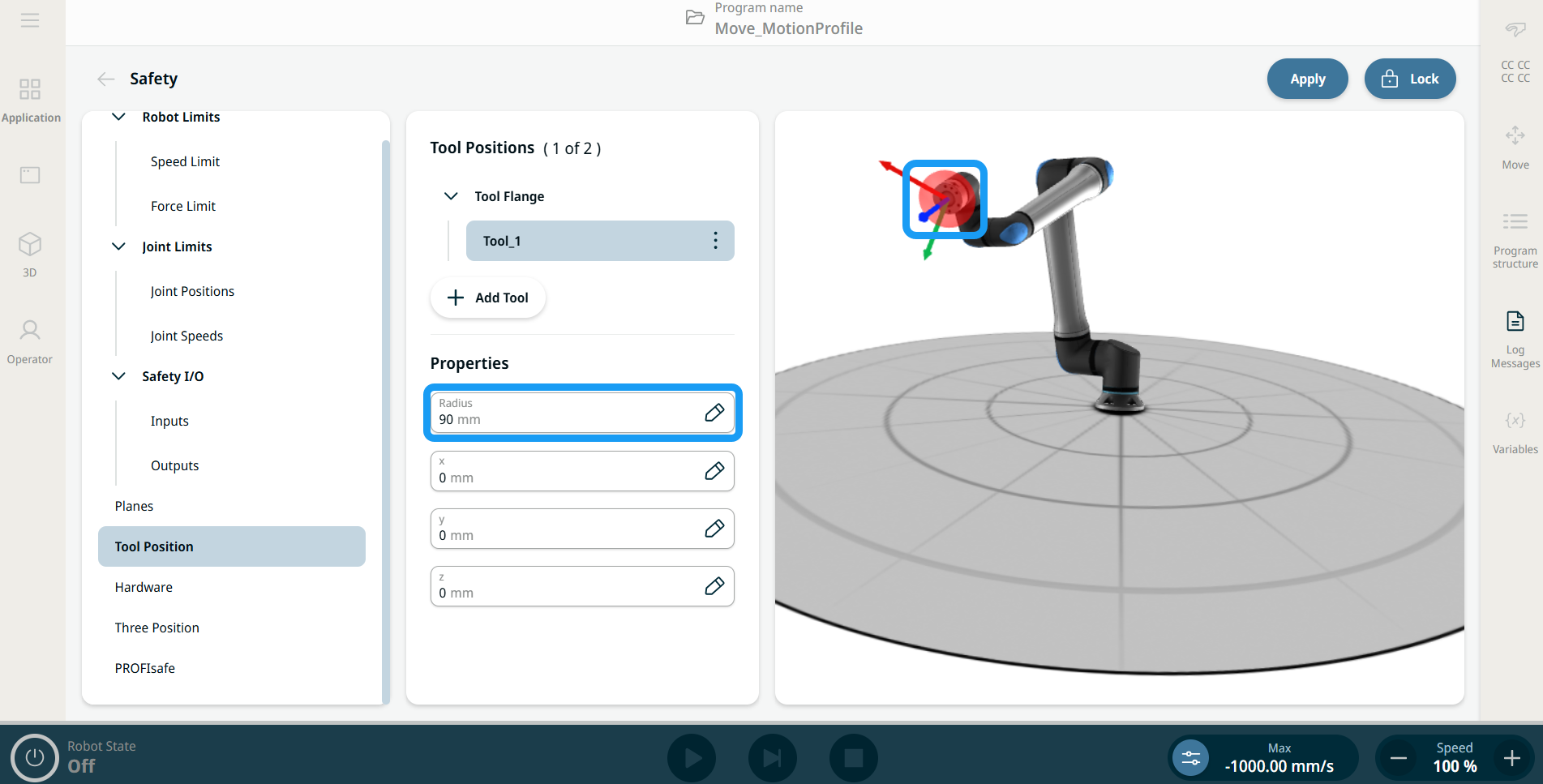
Für die benutzerdefinierten Tools kann der Benutzer Folgendes ändern:
|
|
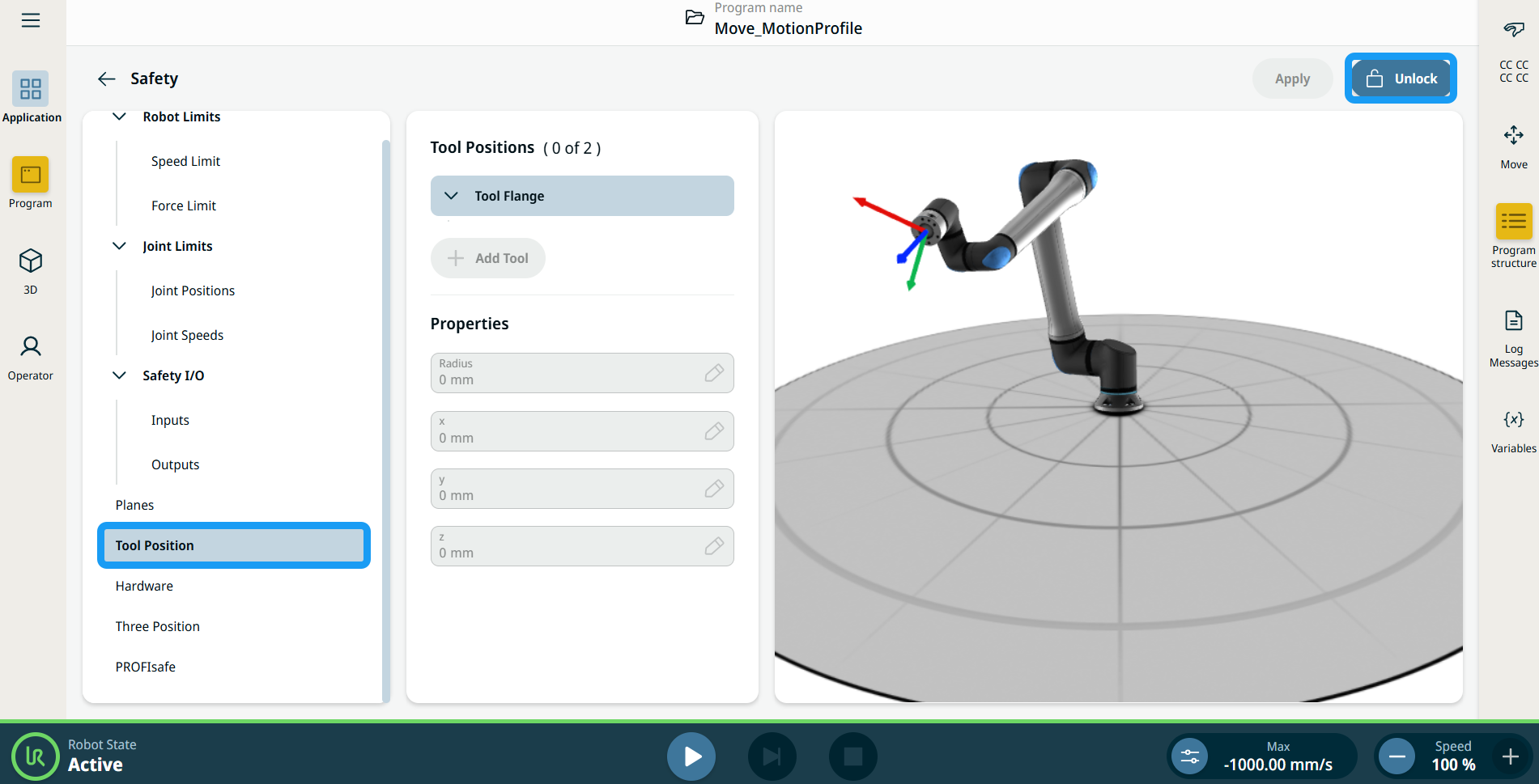
Um auf Werkzeugposition zuzugreifen |
|
|
|
|
|
|
|