Sicherheits-E/A
| Beschreibung |
Die E/As sind zwischen den Eingängen und Ausgängen aufgeteilt und werden paarweise so zusammengefasst, dass jede Funktion eine Kategorie 3 PLd bereitstellt.
Wenn Sie Programme von einem E/A oder Feldbus-Eingang aus starten, kann der Roboter die Bewegung von der aktuellen Position aus beginnen. Es ist keine manuelle Bewegung zum ersten Wegpunkt via PolyScope erforderlich.
|
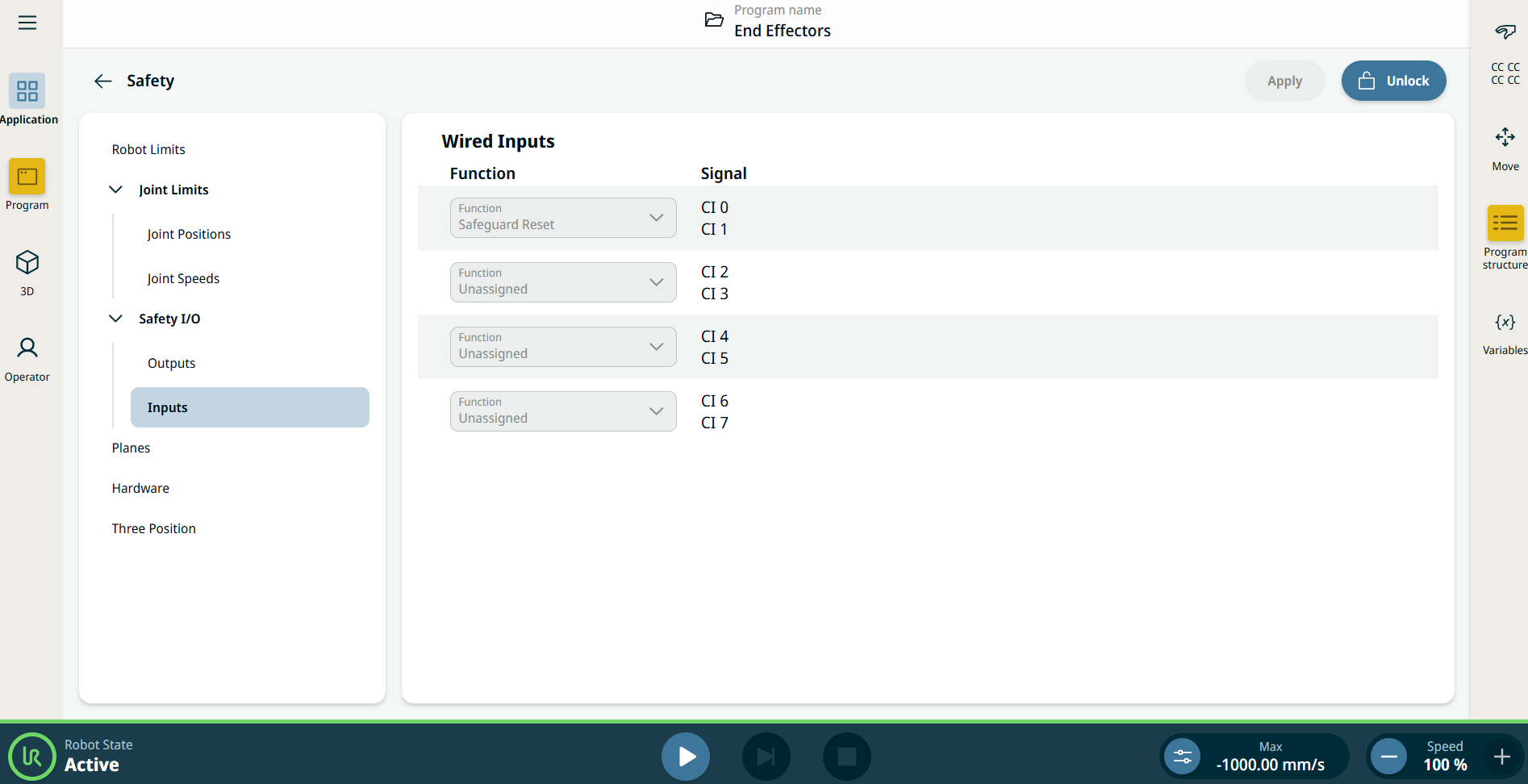
| Controller Eingänge |
Die Eingänge sind in der folgenden Tabelle beschrieben:
Wenn der standardmäßige Schutz-Reset deaktiviert ist, erfolgt ein automatischer Reset, wenn die Schutzfunktion nicht mehr auslöst. Dies kann passieren, wenn eine Person das Schutzfeld passiert. Wenn eine Person nicht vom Schutzsystem erkannt wird und der Person Gefahren drohen, ist ein automatischer Reset durch Normen verboten.
Wenn der Automatikmodus-Schutzstopp aktiviert ist, wird im manuellen Modus kein Schutzstopp ausgelöst.
|
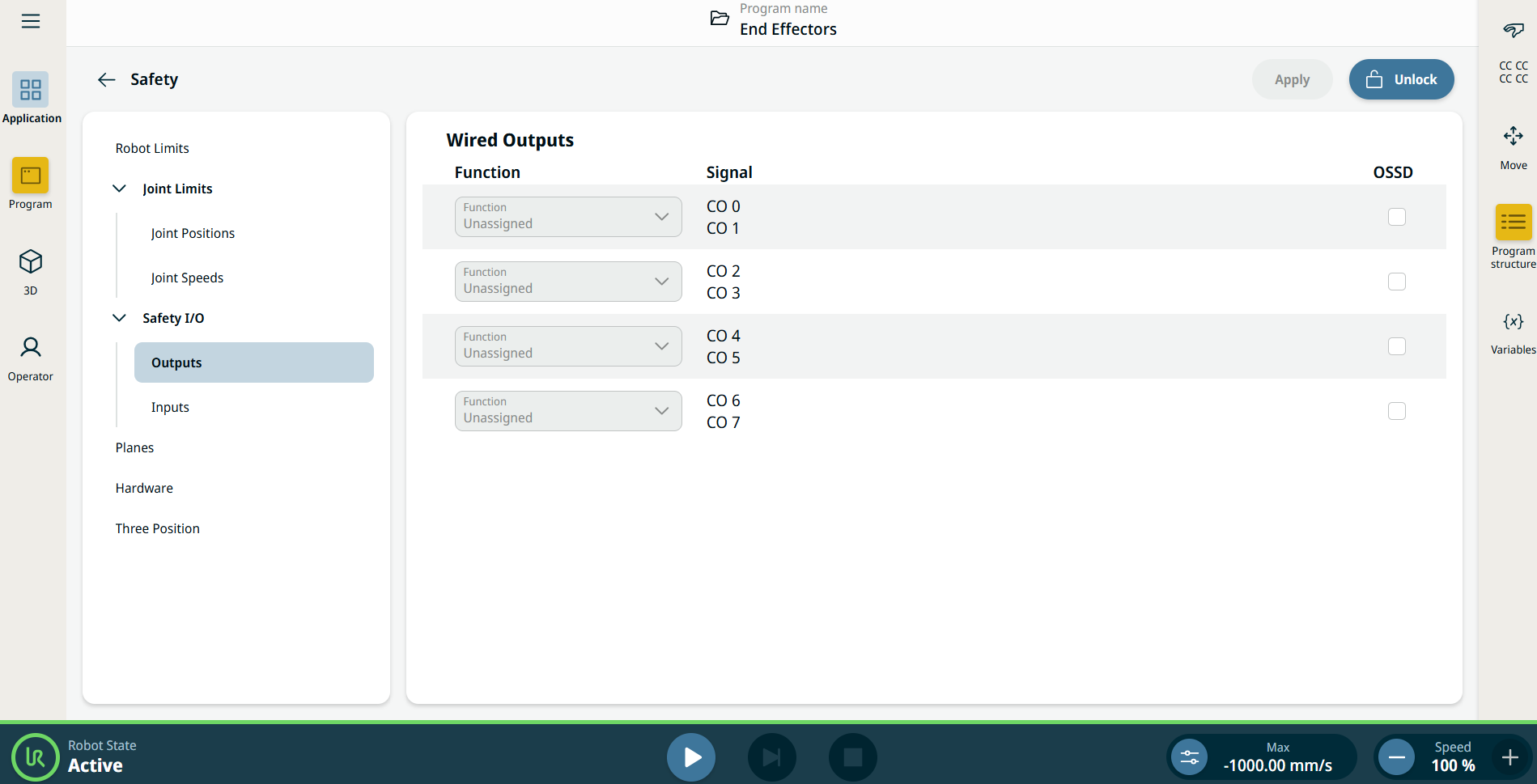
| Control-Box-Ausgänge |
Alle Sicherheitsausgänge werden im Falle einer Verletzung oder eines Fehlers des Sicherheitssystems LOW. Das bedeutet, dass der Systemstopp-Ausgang einen Stopp einleitet, auch wenn kein Not-Halt ausgelöst wird. Folgende Sicherheitsfunktionen können Sie für die Ausgangssignale nutzen. Alle Signale werden wieder LOW, wenn der Status, der das HIGH-Signal ausgelöst hat, beendet ist:
Externe Maschinen, die ihren Notaus-Status über den Systemstopp-Ausgang vom Roboter erhalten, müssen mit der ISO 13850 konform sein. Dies ist insbesondere bei Installationen erforderlich, bei denen der Notaus-Eingang des Roboters mit einer externen Notaus-Vorrichtung verbunden ist. In solchen Fällen wird der Systemstopp-Ausgang HIGH, wenn die externe Not-Aus-Vorrichtung auslöst. Dies bedeutet, dass der Status der Notabschaltung bei der externen Maschine ohne manuelles Eingreifen durch den Roboterbediener zurückgesetzt wird. Um die Sicherheitsnormen zu erfüllen, muss die externe Maschine für einen weiteren Betrieb manuell bedient werden.
|