Place Movement Function
| Description |
A place function uses the move command in the direction of the place where object is to be put and the call command to open the gripper.
|
|
To create Place Movement Function |
|
|
|
|
|
|
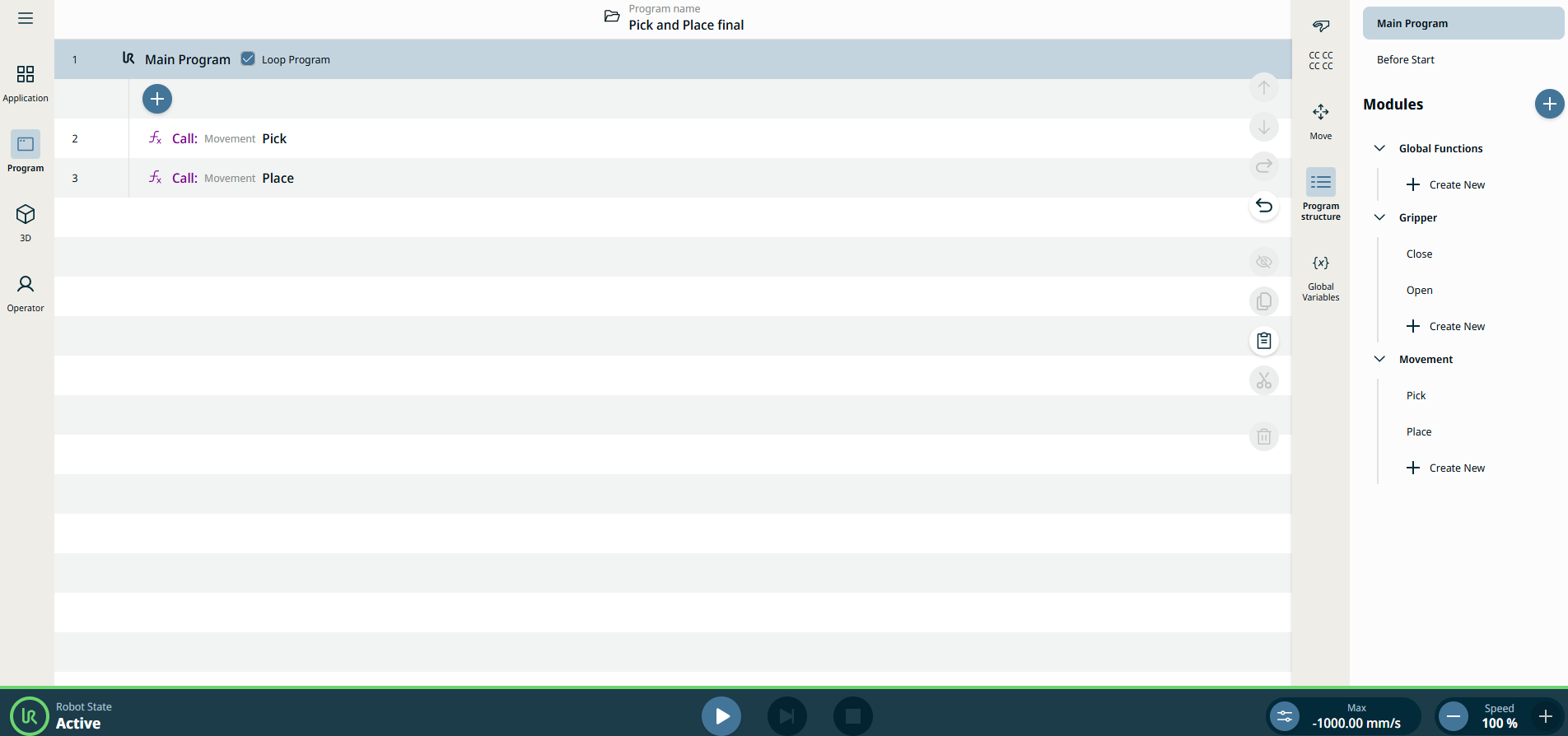
You can see the program tree of the PolyScope X interface when structured in functions and modules:
In structuring your program by functions and modules, it is possible to call functions within functions to make everything even more reusable. Creating a full program mainly comprised of functions will make it easier for you to manage long programs. Furthermore, you make the program more maintainable and avoid repetition in your programing. As you can see on the 3D viewer and Operator screen, the robot movements are still the same as before.
|