How robotic nut running supports automotive assembly
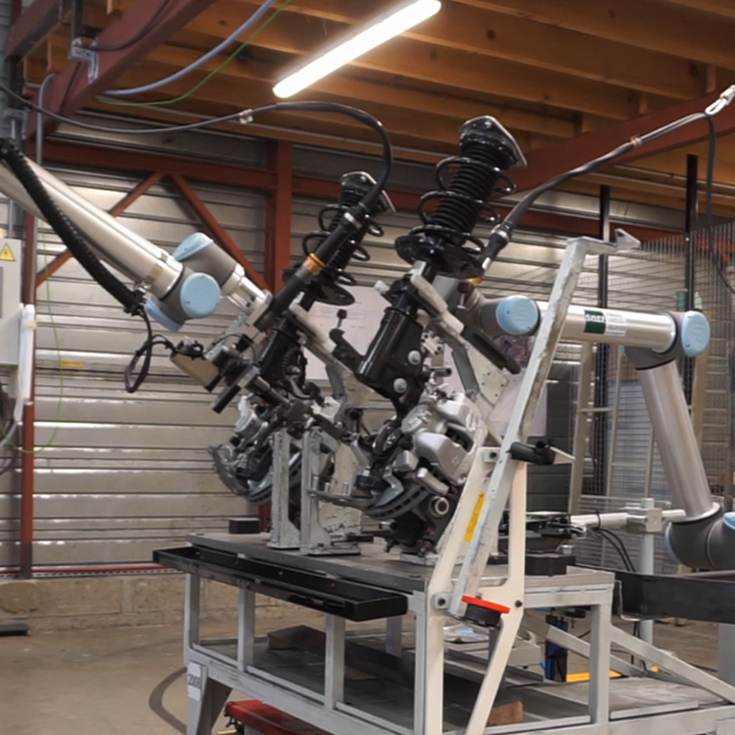
In a robotic nut running setup, the collaborative robot guides the nut‑runner tool to each fastening point with high positional accuracy. Torque and angle are monitored throughout the tightening cycle to ensure compliance with engineering specifications.
Because the robot operates within a collaborative footprint, nut running can be deployed directly at existing assembly stations. This enables manufacturers to automate fastening tasks without re‑engineering the entire cell or introducing rigid safety barriers.
The result is a more predictable fastening process that supports just‑in‑time assembly while reducing variability across the line.