UR Log Viewer - Manual
Instructions on how to use Universal Robot's software UR Log Viewer
Created date: July 10th, 2023.
UR Log Viewer version: 1.3.5.0
Robots: UR3, UR3e, UR5, UR5e, UR10, UR10e, UR16e, UR20 and UR30
Controller Versions: CB3, e-Series, UR20 and UR30
Software Versions: CB3: 3.4 + higher; e-Series: 5.0 + higher and 6.0 + higher. For CB2 and other older SW versions in CB3, you still can use the Support Log Reader (SLR) available in the download section of this support site.
1. General Information
1.1 Purpose
The purpose of the UR Log Viewer Manual is to help UR's users, distributors and integrators to perform service-related analysis and understanding of the robot behavior to support any enhancements and troubleshoot needed.
Universal Robots industrial robots are designed using high quality components to ensure a long lifetime. However, improper use of the robot or robot parts can potentially cause unexpected failures due to misuse. If, for example, the robot is overloaded, dropped during relocation, damaged by collision, or any other improper usage, the warranty will be void.
Universal Robots recommends the user does not attempt repair, adjustment, or make other interventions in the mechanical or electrical systems of the robot without first being trained and consulting an UR certified service engineer. Any unauthorized intervention voids the warranty. Service-related operations and troubleshooting should only be performed by qualified personnel.
Before performing service-related operations, stop the robot program, power it off, and disconnect the main power input to any potentially dangerous tool on the robot or in the surroundings.
In the event of a defect, Universal Robots recommends ordering new parts from the Universal Robot distributor where the robot was originally purchased. Alternatively, parts can be ordered from the nearest distributor, details of which can be obtained from Universal Robots official website at www.universal-robots.com
1.2 Disclaimer
Universal Robots continues to improve reliability and performance of its products, and therefore reserves the right to upgrade the product without warning. Universal Robots takes every care that the contents of this manual are precise and correct but takes no responsibility for any errors or missing information.
2. UR Log Viewer
2.1 Intro
The UR Log Viewer is a software intended for reading and viewing the Support File from the Universal Robot’s cobots, which are generated automatically inside each robot, and contain the log files, programs and flight reports. This software is a support tool for the user to troubleshoot in case needed. It is a tool for understanding the robot behavior and have data analysis, as well to do improvements, based on this data, to your application and programming.
2.2 Applicable to
UR3, UR3e, UR5, UR5e, UR10, UR10e, UR16e, and UR20.
2.3 Requirements
To install and execute the UR Log Viewer you need the following requisites:
- OS Windows 7, 8, 8.1 or 10 – current version doesn’t work on Linux or Mac.
- .Net 4.8 minimum installed
- User access defined to be able to install and execute the software
- Works with Polyscope SW versions:
- CB3: 3.4 + higher
- E-series: 5.0 + higher, and 6.0 + higher
NOTE: Check that your version of the ".net framework" is up to date. You can download the version from Microsoft’s website: http://www.microsoft.com/download/
NOTE: For CB1 or CB2, please use the Support Log Reader (SLR) found on UR’s support site.
2.4 Installation
2.4.1 Download UR Log Viewer
First step is to download the UR Log Viewer’s software from Universal Robot’s website: www.universal-robots.com/download . Choose robot version: CB-Series or e-Series -> Software -> UR Log Viewer
2.4.2 Steps to Install
To install in your computer, you first need to unzip the file in your computer, secondly double click on the UR Log Viewer Setup file in the folder, run as administrator if needed, then follow the instructions shown on your computer screen:
Select the software language
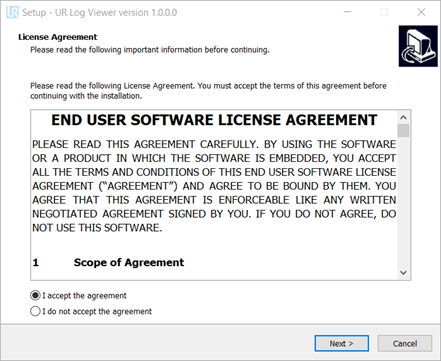
Approve the License Agreement
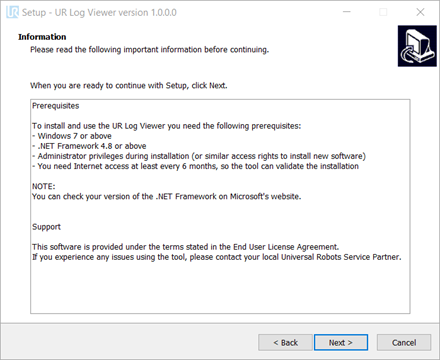
Read the software information regarding installation
Choose if you want to create a desktop shortcut
Begin the installation
Complete installation and run the software
2.5 How to use the UR Log Viewer
The purpose of the tool is to read, analyze and examine robot data from e-Series and CB-Series robots. Any findings based on this tool is the sole responsibility and interpretation of the user. To have a final saying in case of service needs, please refer to your distributor or provider for guidance on service, training and warranties.
2.5.1 Type of files supported
The following files are supported:
- Support File (implemented on SW 3.13 and 5.8 forward): ex.: ur_20195099999_2020-07-16_09-24.zip
- Flight Reports: ex.: recording20200520_17_59_14.zip
- Log History: ex.: log_history.txt, log_history.bak
- Real-time recordings: Created by UR Log Viewer: ex.: recording.csv
- Service File (via “urmagic_data_capture_v0_6_X.sh”): ex.: ur_service_20235XXXXXX_2023-09-08_16-50-24.zip
2.5.2 Loading the file
The available file can be either dragged and drop on the Log Reader tab or opened by selecting the path where the file is stored in your computer. A third option is by selecting it directly from Windows, using right-click on the file -> open with -> choose another app -> UR Log Viewer.
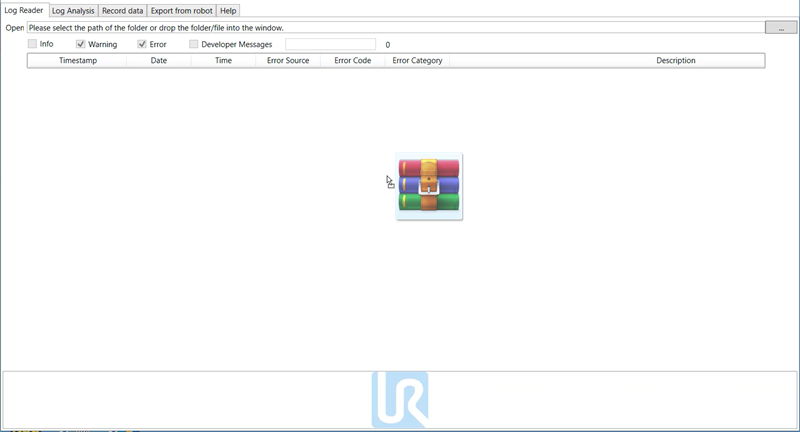
Option of opening support file by drag and drop on the Log Reader tab on UR Log Viewer
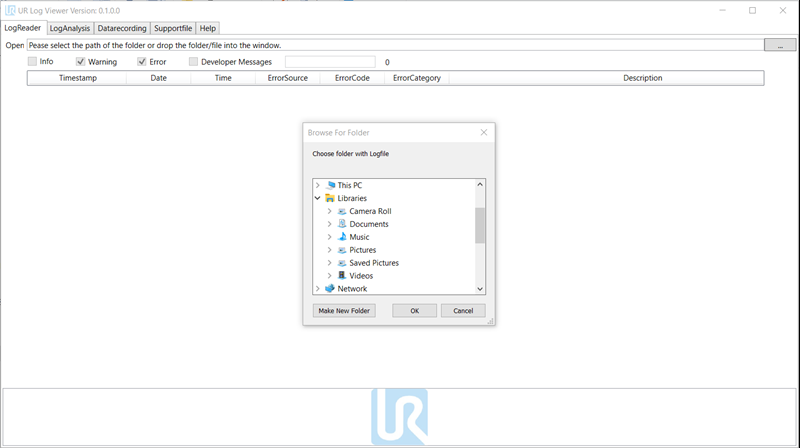
Option of opening a support file by folder path selection on the Log Reader tab on UR Log Viewer
NOTE: If you try to load the file and it doesn’t allow you to do so, please restart your software and try it again. Make sure you have the correct file while loading. If you need any support or service, consult your local Universal Robots distributor or Universal Robot’s website.
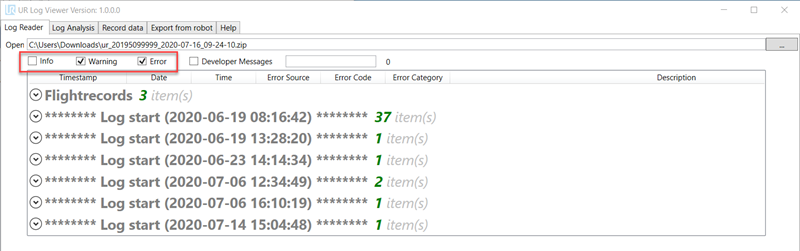
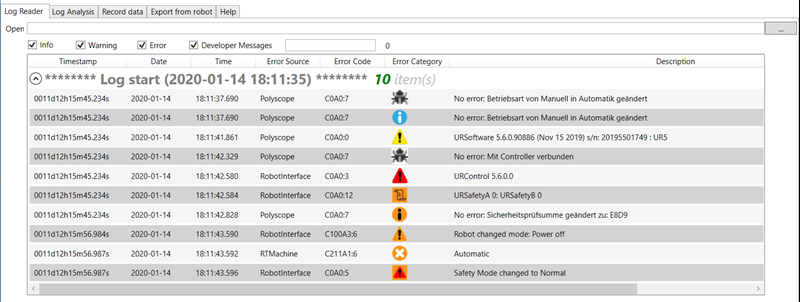
2.5.3 Log Reader Tab
Use this tab to load the desired support file. If a log file is loaded, you can choose which types of messages to be shown.
Once the file is loaded you will have the option of choosing which types of messages to be shown on the Log Reader screen, the options are:
- Info
- Warning
- Error
NOTE: "Developer Messages" are intended for expert-level users only. Please use it only if advised.
The user will see the Flight Records section only when opening a Support File, Flight Report file or Real-time Recordings data file, if you open a Log History file, you will only see the Log Start section with the info, warnings and error codes and their respective entries.
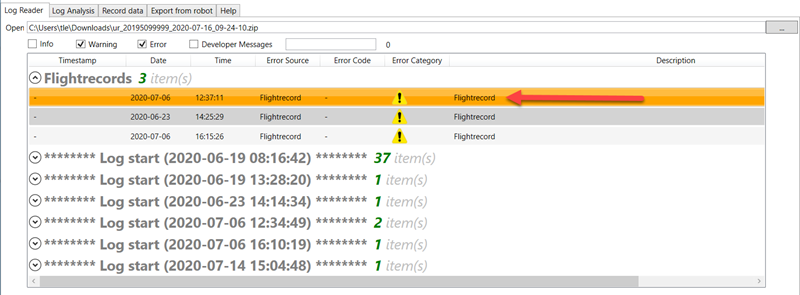
2.5.3.1 Flight Records
The Flight Records section gives the user the capability of generating graphs from the stored data on the mentioned files above. To open the standard graphs, double-click on the Flight Record entry to open the graphs of the data recordings.
This will open 6 new windows with real-time data graphs for the selected Flight Record. Each opened window contains data for the respective joint and the data of the exact moment of the fault that has happened on the robot.
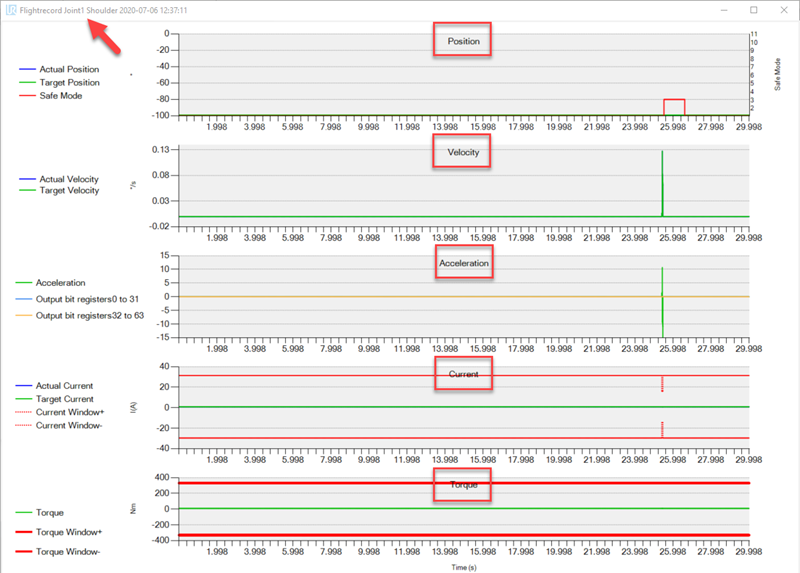
Representation of the standard graph window at the exact fault recorded data from joint Shoulder
The standard generated graph contains information of the robot behavior when it had the fault. The information shown on the standard graph is: Position, Velocity, Acceleration, Current, Torque.
If you need any other graph to be generated, the user has the option of choosing other data variables by right-clicking on the Flight Record and choosing on the seen drop-down list:
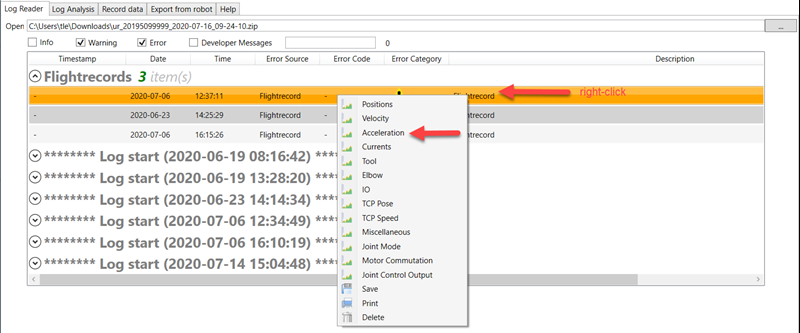
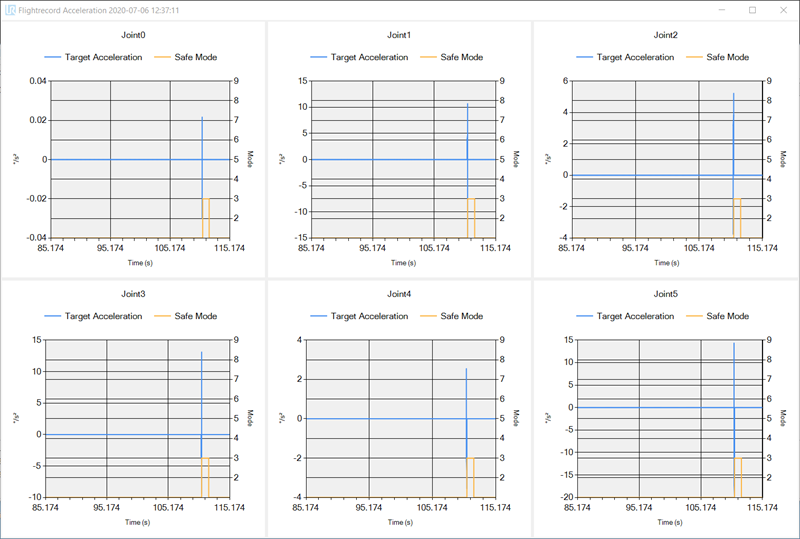
Example of a personalized graph generated of all joints by right-clicking on chosen Flight Record and picking acceleration at the time of the fault
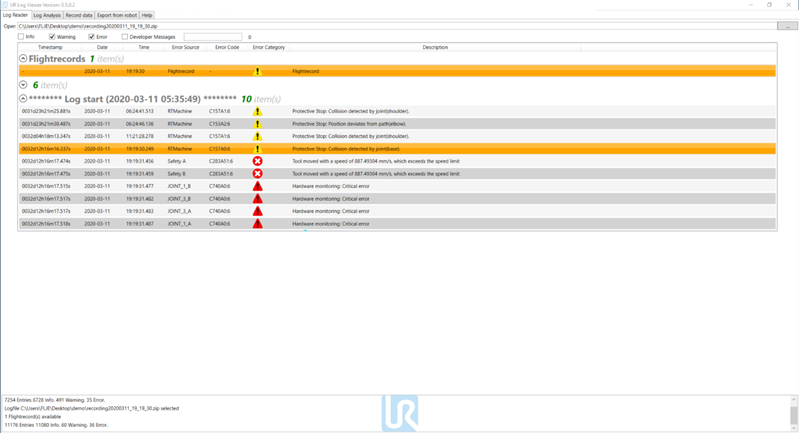
2.5.3.1 Log Start
To read the log history section, you must click on the Log Start arrow to open and be able to read where the entries from the robot will be shown accordingly to its date and time and the type of message. The description of the message, error category, error code, error source, time, date and time stamp will be shown after opening the log start entry.
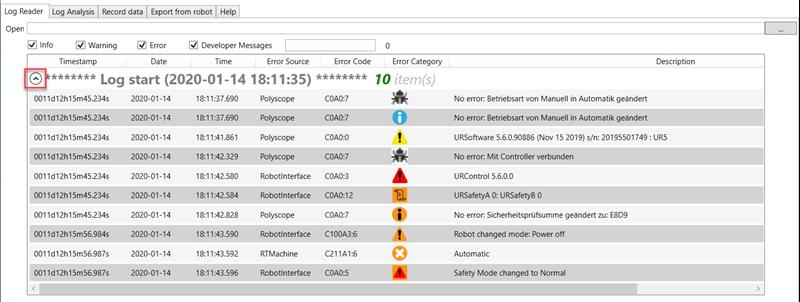
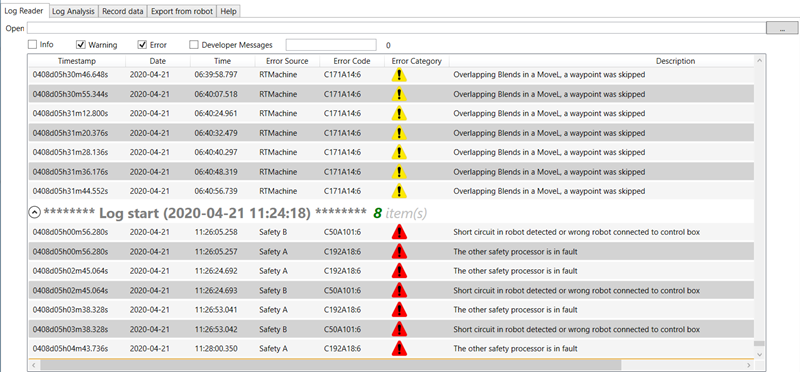
Example of a window showing warning and errors from a log start entry
Shortcuts:
CTRL+C: Copy the selected Log History line.
CTRL+E: Copy the error codes of the selected Log History line(s). You can select many line and click the shortcut to copy the codes.
2.5.4 Log Analysis Tab
Use this tab to see a summary of important error codes found in the loaded file. You can select different time frames to see the progress of your robot in time.
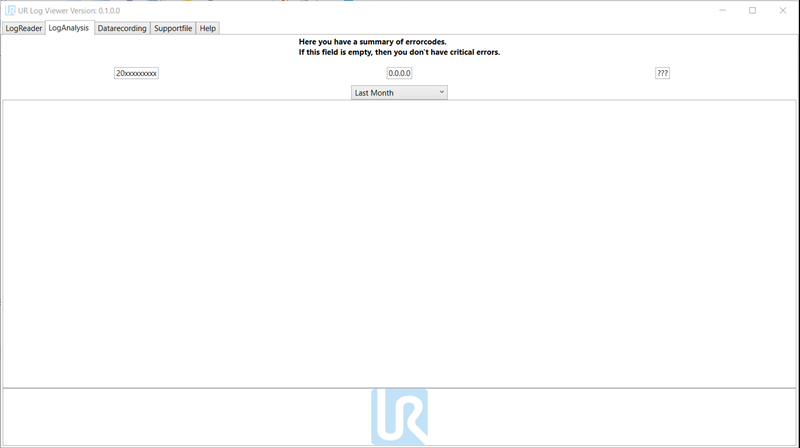
The Serial Number of the robot, the robot software current version, and the last program running on the robot will be displayed on this screen for information.
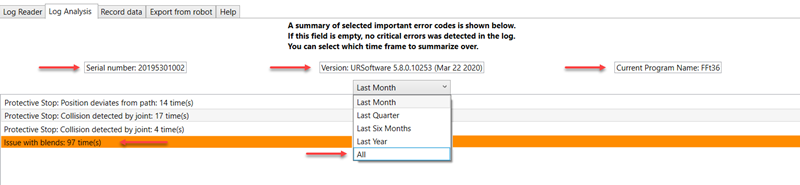
If a high number of critical error codes are found, they will be highlighted on the list for awareness and corrective actions to be taken by the user to solve the source of the message.
NOTE: If you have a high number of messages shown up on the Log Analysis tab, take action to try to solve the source of these error/warning messages generation. It is not right to have many messages showing up on the robot, they need to be acted upon.
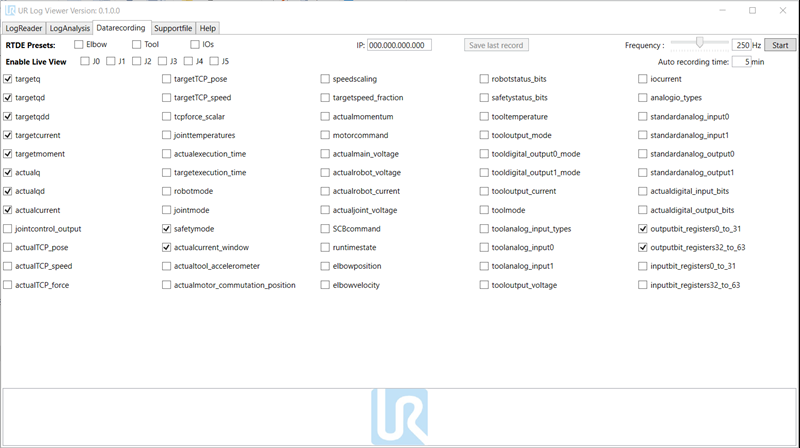
2.5.5 Record data Tab
This tab enables the real-time data recording of the robot connected through ethernet cable with your computer.
Before starting to record any data, make sure you have your computer connected to the robot’s ethernet port and you have setup your computer’s IP address on the same range of the robot’s IP address. Make sure your firewall is not blocking the connection from happening.
After you have the connection done, select the relevant data fields you want to be recorded. The frequency of update can be defined as wanted. You can adjust sample time and measurement duration for the recording. We advise keeping the default values not to create high memory consumption. Press “start” on the right top corner for the data recording to begin and make sure RTDE Interface is enabled "on" robot security.
NOTE: High frequency combined with long sample periods leads to big data traffic recordings, potentially affecting memory consumption on some systems.
After starting to record, the data will be available in the Log Reader’s tab. Please check if your robot’s software version has all selected data field available, if not, update your robot to the latest software version for complete usage experience.
Shortcuts:
CTRL+A: Select all check boxes
CTRL+N: Select the default check boxes
2.5.6 Export from robot Tab
The Export from Robot tab allows you to create and export the Support File from your connected robot via Ethernet connection to the computer. Refer to 2.5.5 Record Data tab topic in this manual, to understand how to connect the robot’s and computer IP addresses.
For older robot software versions (PolyScope 5.7 and 3.12 below) the Log History and Flight Reports are retrieved instead of the Support File.
After the download the user will be asked, if he/she wants to open the pulled data directly on UR Log Viewer or just store in the computer.

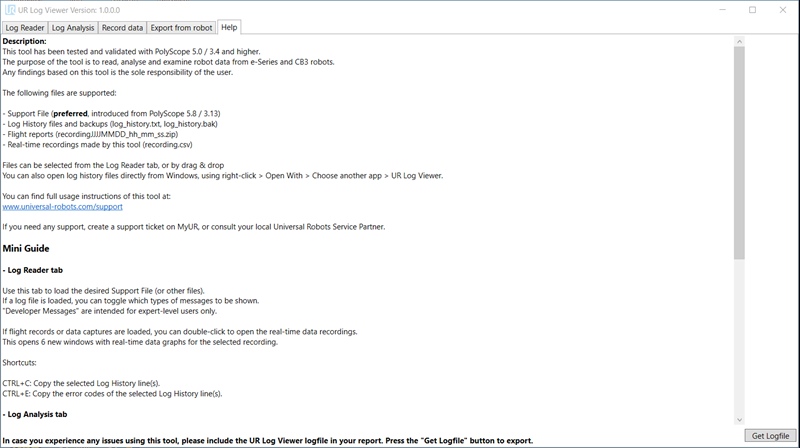
2.5.7 Help Tab
In the Help Tab window, you will find the software description and a summary of this manual. Please use it for future reference.
In case you experience any issues using the UR Log Viewer software, send the logfile to your provider so we can always improve and add new features. For downloading the UR Log Viewers logfile, press the button on the right bottom corner “Get Logfile”. A pop-up window will open, choose where to save it and send it to your UR Log Viewer provider.
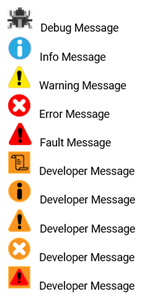
3. Type of Messages
Message’s icons in this document contain information that helps you to understand and troubleshoot the robot.
The Symbols are the same as in the protocol tab from Polyscope.