
External noise reduction
How to improve robot performance in noisy environments
Examples are valid for: All Universal Robots
This states some good practices when installing a Universal Robot in an environment where the robot is exposed to electromagnetic interference, this is often seen as communication problems, or lost packages.
- A typical type of interference is radio conducted Electromagnetic Interference (EMI) from other equipment in near proximity, such as motors starting and stopping or welding equipment.
- EMI can also be conducted to the robot trough the power cord from all other equipment connected to the same power installation.
- Electrostatic Discharge (ESD) to the tool or tool flange often seen when grapping objects from a conveyer or handling objects made of plastic.
Ground point
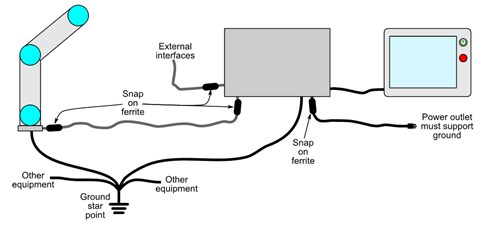
It is always a good practice to establish a common ground for all equipment in an installation. The best way is to create a star point connected to factory ground, and then connect this point to all elements in the installation.
- The controller box has a ground point inside; use this for connecting the controller to the star point.
- All other equipment and metal frames in the installation should be connected to the same star point.
- If the robot operates in an environment with heavy electromagnetic interferences, it is suggested to connect the base of the robot to the star point as well. Be aware that the base is annodized which works as an electrical isolator, therefore it is necessary to ensure a good connection.
 |
Distance between cables
Keeping distance between different cables and ensure that the cables are not in near proximity to coils, motors or other equipment changing state or turning on and off, will reduce the interference.
The electrical and magnetic fields generated from electrical equipment decreases exponentially with the distance. So keeping at least 100mm between cables will ensure that the most of the fields has vanished and thereby does not conduct into e.g. the robot cable.
Using I/O’s
If the I/O’s on the Safety Control Board is connected to a PLC or other powered equipment, it is recommended to use the 24V power supply from the equipment instead of the one available inside the controller box. This makes all the external equipment running on the same supply, and makes a complete galvanic isolation between the equipment and the robot.
If the equipment does not have a power supply the one provided by the robot can be used. But if problems are seen with the equipment or the robot communication, it is recommended to install an external power supply.
Uninterruptable Power Supply (UPS)
In some regions the mains power, is noisy with transients, spikes, dropouts and dips. In these situations a UPS can help ensuring a clean supply for the robot.
The UPS must have following specifications:
- Protect against: Transients spikes, dropouts, over and under voltages
- Be rated according to the robots power consumption
Insulate Gripper
In some installations where the robot handles plastic object or picking items from a conveyer the tool it exposed to a lot of ESD.
In this case insulate the tool from the tool flange electrically can protect the robot for discharges that can cause communication issues. Ensure a proper grounding of the gripper.
Example: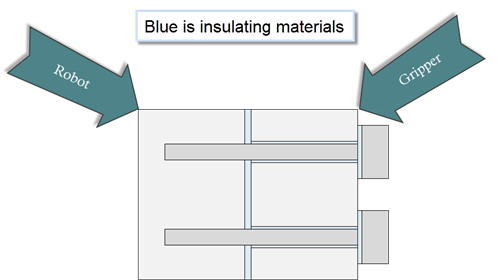
Software version
Ensure that the software installed on the robot is 3.1.18024 or later, since this software version introduced a more stable communication between the Safety Control Board and the Joints, Tool and Teach Pendant.
If the communication problems are seen between the Safety Control Board and Tool or Teach Pendant it can be necessary to contact the local UR tech support to get the Tool, Safety Control Board and Teach Pendant updated.
If the robots serial number is lower than the following, an update of the Tool, Safety Control Board and Teach Pendant firmware can have a great effect if communication problems are seen with these parts.
- UR3 2015330114
- UR5 2015351075
- UR10 2015300919
Ferrites
Ferrites can be used to reduce the interferences from entering the system.
If there are problems with the robot communication, or devices connected through USB or Ethernet, this could be a sign that the robot is exposed to EMI, either conducted through the power outlet or radiated from other wires close to the power or robot cable.
Adding a ferrite to these points can relieve the problems:
- A ferrite placed near the controller box on the power cable will block most of the interferences coming from the power outlet.
- A ferrite placed on the robot cable near the Control Box will block the noise conducted to the robot cable from entering the controller.
- A ferrite placed on the robot cable near the robot will block the noise conducted to the robot cable from entering the robot.
- A ferrite at all input/output cables close to the Control Box
 |
 |
 |
The use of a ferrite can be beneficial, they can be bought from different suppliers, a recommended one can be Laird-Signal Integrity Products (Part number 28A5131-0A2) with an impedance of 425 Ohm (Digi-Key Part Number 240-2199-ND) placed at the mentioned spots, with the cable going through the ferrite 2 times.
However, on e-Series the cable is too thick to go through the ferrite twice. In that case we recommend to use Laird-Signal Integrity Products: 28A5131-0A2 with the Robot Cable just going straight through, to avoid stress of the cable. The ferrite will still provide damping of the noise.