
Circular path using MoveP/MoveC
How to make circular path using MoveP/MoveC
Examples are valid for:
CB2 Software version: 1.5 and newer
CB3 Software version: All versions
e-Series Software version: All versions
What is MoveP?
MoveP is a movement type available in software v1.5 and newer.
MoveP will move the tool in linear motion at constant speed with circular blends, and is intended for process operations, like sealing or dispensing.
The size of the blend radius is per default a shared value for all the waypoint. A smaller value will make the path turn sharper whereas a higher value will make the path smoother.
The maximum TCP-speed is dependent on the size of radius > smaller radii results in lower TCP-speed.
While the robot is moving through the waypoints with constant speed, the robot cannot wait for either an I/O operation or an operator action. Doing so will might stop the robots motion, or cause a security stop.
Making a circular path using MoveP
Basically it is possible to create a circular movement in two different ways.
Both ways requires the use of MovePcommand. (This is a movement type intended for processes, ie. sealing or similar)
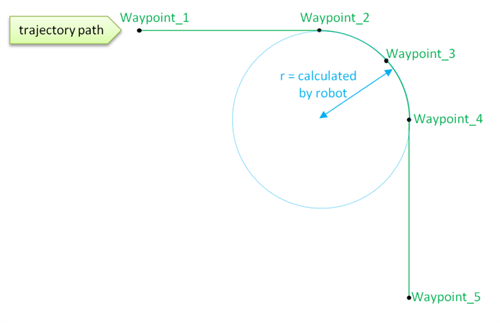
1. Circular path with CircleMovecommand
By teaching 3 positions in a circular path, the robot will automatically calculate the radius.
The first position defines the start of the circle and the two subsequent waypoints must be teached as CircleMove
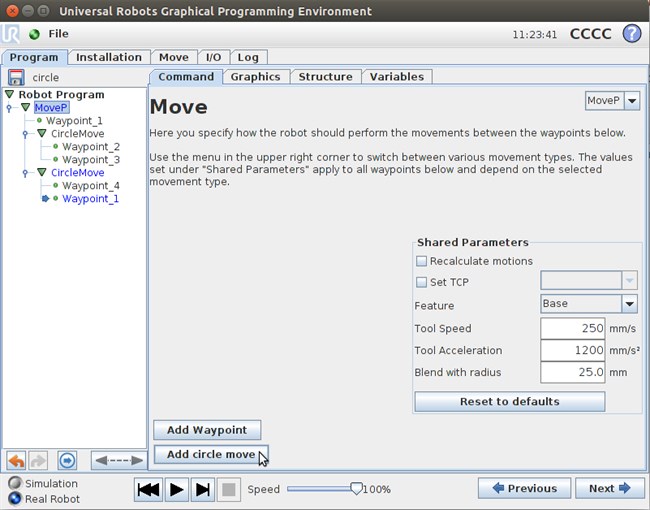
In this example Waypoint_2 defines the start of the circle and Waypoint_3 is used for calculating a circular movement to end in Waypoint_4.
Please note the box Shared Parameters for the MoveP command. Here the blend radius is set to 25 mm. by default.All waypoints in this example use the shared parameters:
2. Circular path with indication of radius
By defining the radius in a given waypoint, the robot will make a circular movement when reaching the radius of the waypoint.
The circular movement will blend into next movement when reaching the radius of the waypoint again.
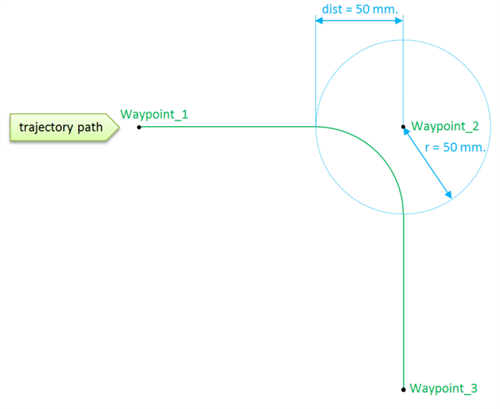
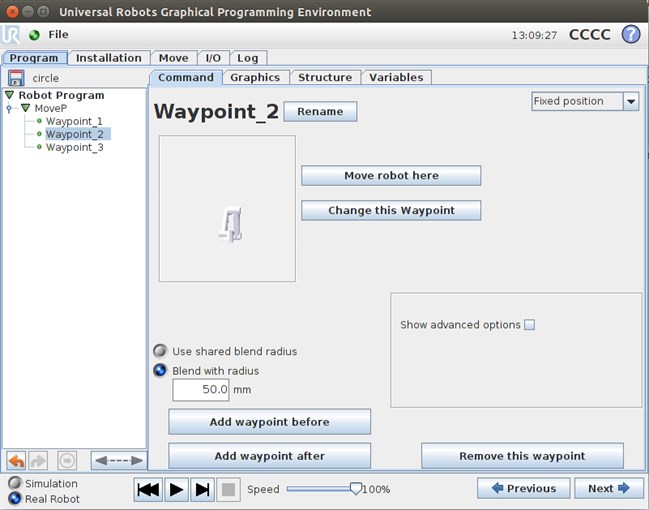
Waypoint_1 and Waypoint_3 use the shared parameters, but blend radius for Waypoint_2 is set to 50 mm.
Precaution:
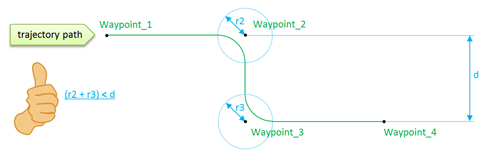
Radius for two waypoints under a MovePcommand must be less than half the distance between waypoints, otherwise a waypoint will be skipped by the robot, resulting in an un-intentional path.
In this example the radius for Waypoint_2 + the radius for Waypoint_3 is less than the distance between Waypoint_2 and Waypoint_3
Result: robot will move as intended
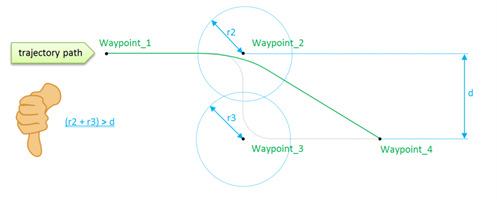
In this example the radius for Waypoint_2 + the radius for Waypoint_3 is exceeding the distance between Waypoint_2 and Waypoint_3
Result: robot will skip Waypoint_3
Download Polyscope .urp below