
Assigning special functions to inputs and outputs
Using an input to start or stop the program, and setting an output to indicate whether the program is running
This example is valid for CB3 Polyscope software version 3.1 and onwards
For E-series robots the procedure is similar, only changes are regarding Polyscope screen location, please refer to the user manual for instructions.
Inputs and outputs can be used for special functions.
Inputs may be used to start, stop or pause the program, or as an external freedrive-button.
Outputs can show whether the robot is running or not.
Start out by going to the "Program robot" section.
Assigning functions to inputs
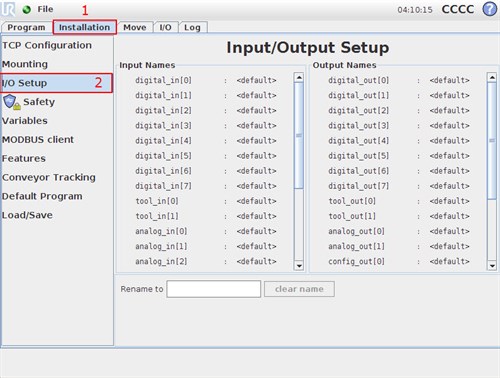
- Click the "Installation"-tab (1) and go to "I/O Setup" (2).
- Choose the input that you would like to assign a function to.
In this case we want to assign a function to "digital_in[0]".
Then choose the "IO Action" dropdown menu.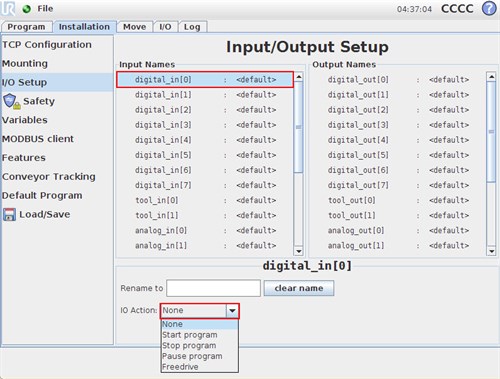
- The dropdown menu has four options:
- Start program: Starts the loaded program
- Stop program: Stops the loaded program
- Pause program: Pauses the loaded program
- Freedrive: Sets the robot in freedrive-mode, just like the button on the back op the Teach Pendant.
The start, stop and pause function will do the same, as pushing the below screen buttons:
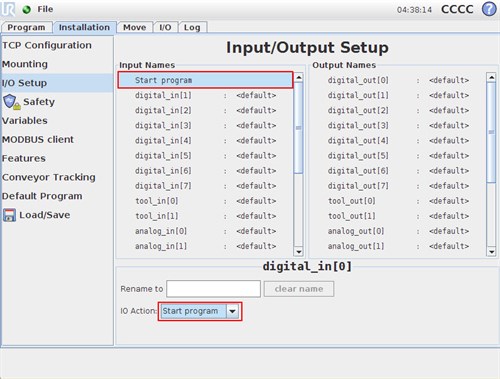
It should be noted that the freedrive-button does not work, when the program is running, but it only for teaching waypoints. - In this case, we will chose the "Start program" function.
Note: You cannot assign functions to configurable inputs or analog inputs.
Assigning functions to outputs
- Click the "Installation"-tab (1) and go to "I/O Setup" (2).
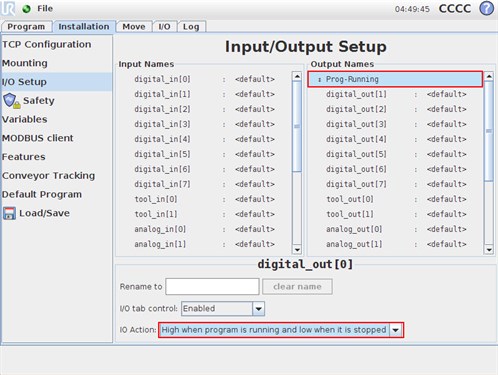
- Choose the output that you would like to assign a function to.
In this case we want to assign a function to "digital_out[0]".
Then choose the "IO Action" dropdown menu.
- The dropdown menu has three options:
- Low when program is not running
- High when program is not running
- High when program is running and low when program is not running - In this case, we will chose the "High when program is running and low when program is not running" function.
Note: Analog outputs can be set to have their minimum or maximum value, depending on whether the program is not running.