
MIRAI: Vision-Based Controller for Handling Variance
Micropsi
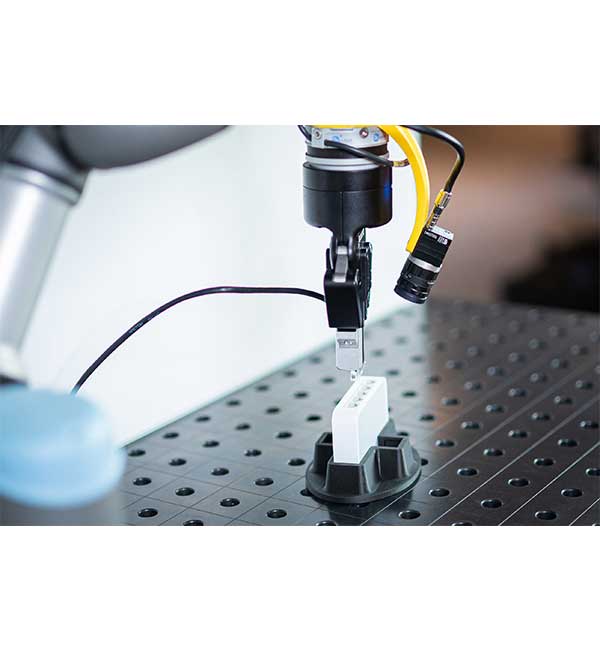
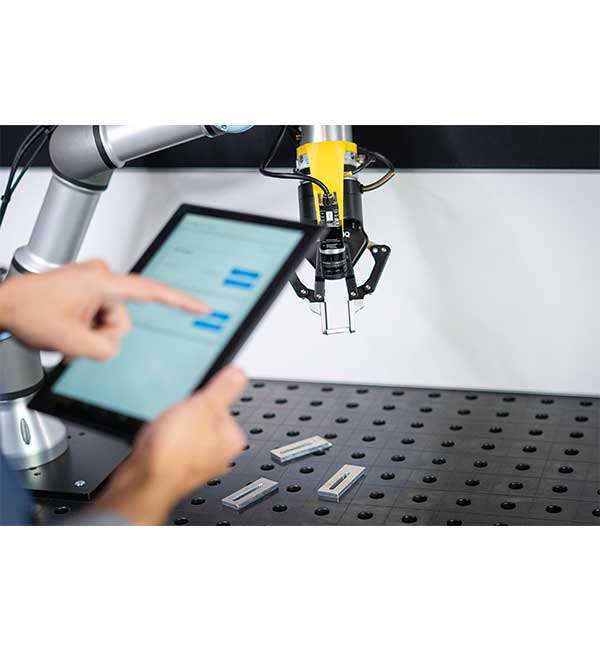
MIRAI (by Micropsi Industries) is a vision-based control system that enables industrial robots to deal with variance in position, shape, or movement. Using artificial intelligence, the MIRAI controller generates robot movements directly and in real-time, as opposed to outputting individual measurements. Deploy MIRAI in assembly, testing and measuring, machine tending, gripping, or contour following (e.g., for dispersing). MIRAI can be used for multiple steps within a task (e.g., gripping from variable position and assembly with varying shape). It can also be flexibly retrained for new tasks. Skills are not programmed but trained through human demonstration in a few days — no knowledge of programming or AI necessary.





Contact us
Your inquiry will be sent to our UR+ partner, who will contact you as soon as possible.
Local Office
- Universal Robots USA, Inc
- 27175 Haggerty Road, Suite 160
- 48377 Novi, MI
Contact us: +1 844-462-6268
Contact us: + 1-844-GO-COBOT