ロボットを位置まで移動の使用
[ロボットを位置まで移動] を使用すると、プログラムの完了後、ロボットアームを開始位置に移動させることができます。 プログラムを実行する前にロボットアームは開始位置にある必要があります。
詳しい情報は、ロボットのユーザーマニュアルの「ロボットを位置まで移動」セクションをお読みください。
3PE ボタンを使用してロボットアームを位置に移動するには:
-
When your program is complete, press Play
-
[最初から再生] を選択します。
PolyScopeで [ロボットを位置まで移動] 画面が表示され、ロボットアームの動作が表示されます。
-
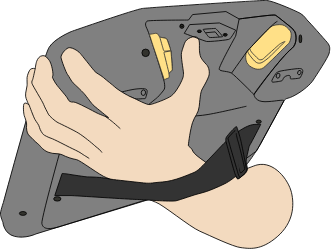
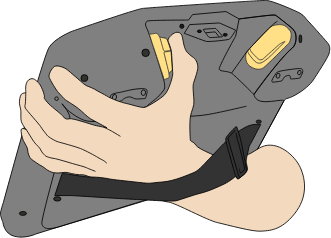
Light-press and hold the 3PE button.
-
Now, on PolyScope, press and hold Automove, for the robot arm to move to the start position.
[プログラムの再生] 画面が表示されます。
-
プログラムを実行するには、3PE ボタンを軽く押したままにします。
-
3PEボタンを解放するとプログラムが停止されます。