Planos de E/S
| Descripción |
La función Planos de E/S proporciona un uso más flexible de los planos de seguridad en comparación con el estándar Planos de seguridad estándar. Permite activar y desactivar planos de seguridad mediante entradas en los terminales, y/o generar una señal de salida cuando las esferas de seguridad atraviesan un plano de seguridad.
|
|
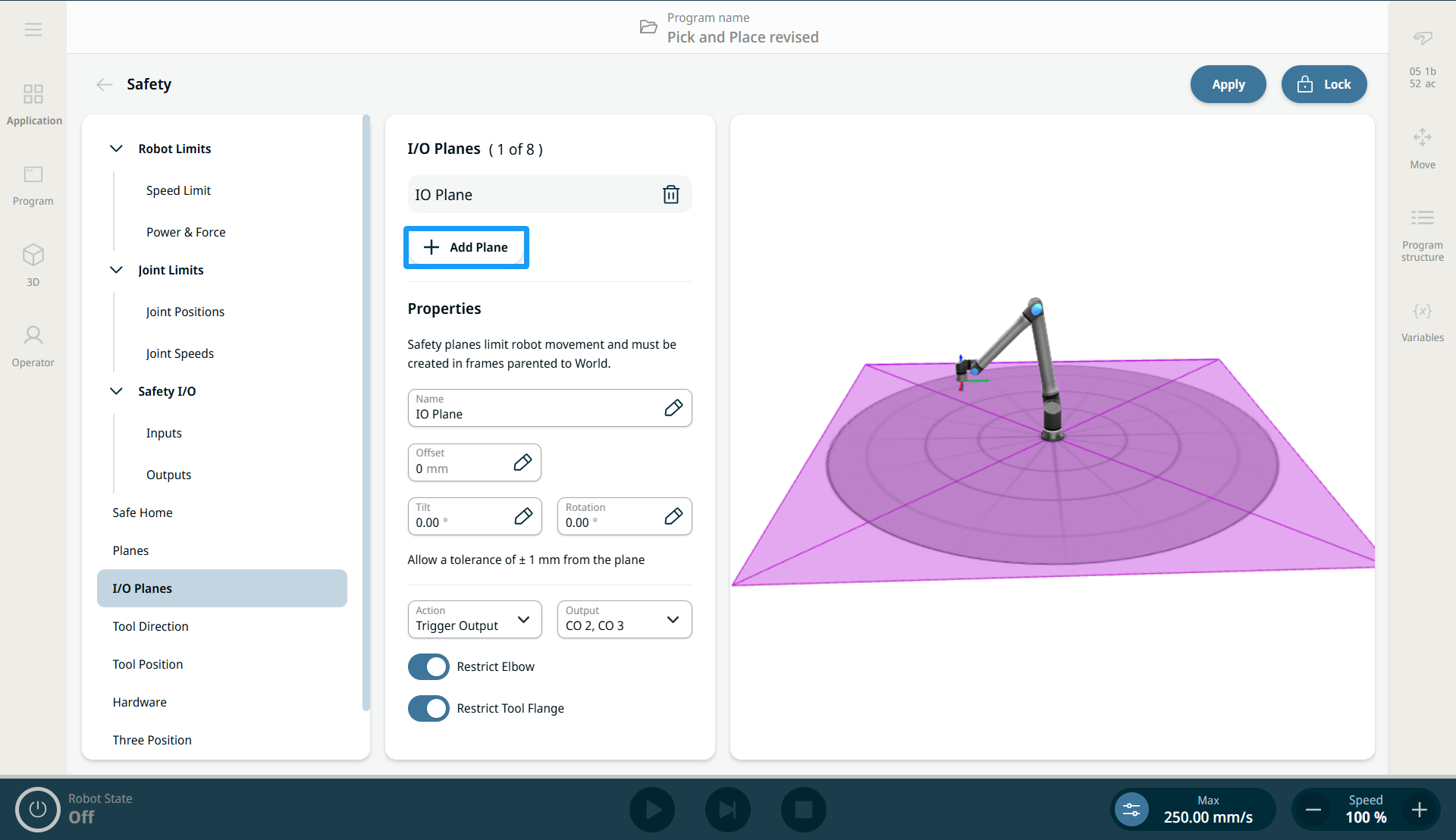
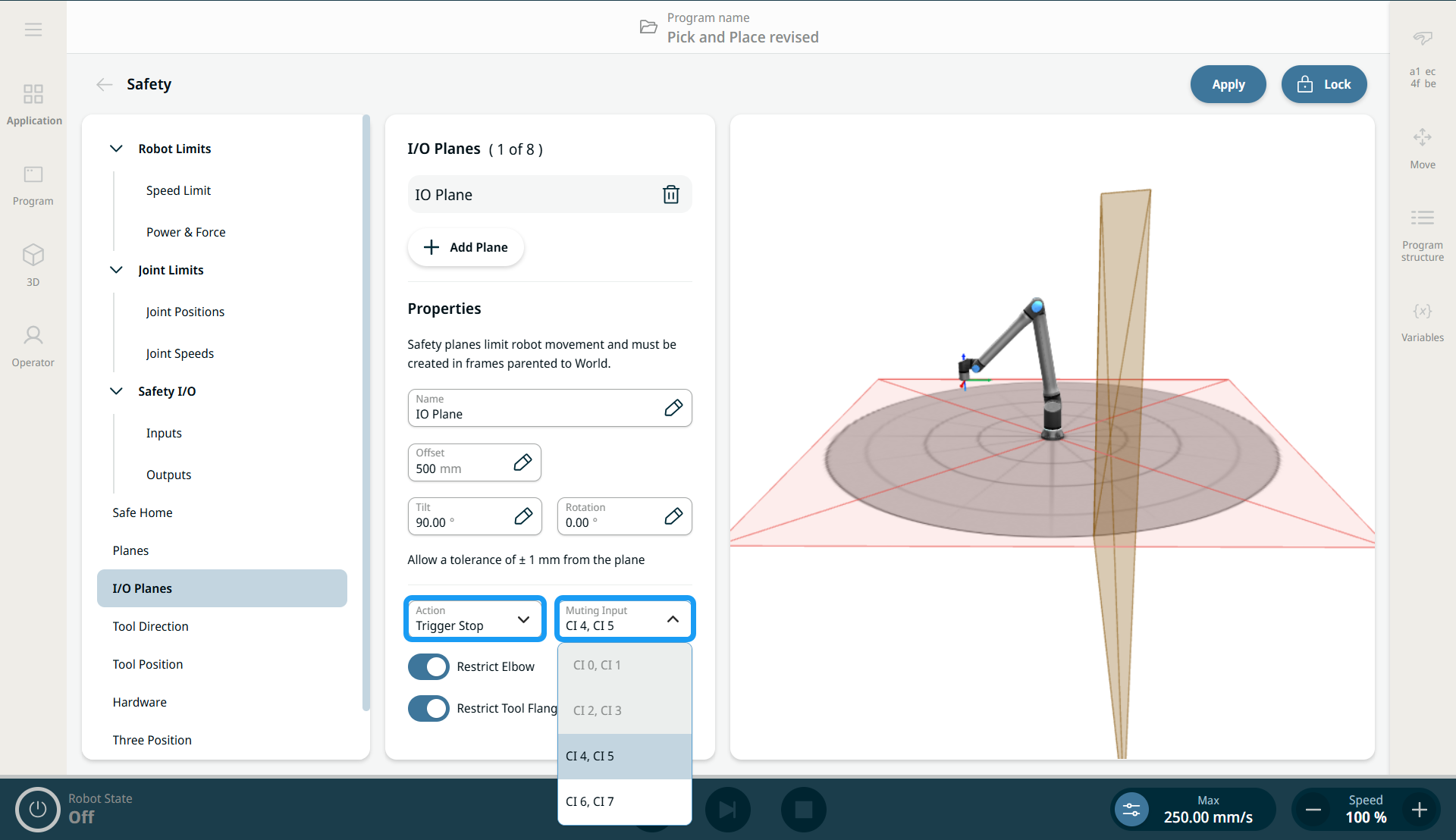
Plano de entrada/salida |
Trigger Stop desen cadena una parada del plano de E/S. Se puede silenciar mediante una entrada de seguridad. A menos que se silencie, el movimiento hacia el avión hace que el robot se detenga y espere hasta que la entrada de seguridad silencie el avión. Cuando el plano está inactivo, el robot puede moverse libremente. Cuando el plano está activo y el robot no ha cruzado el plano, el robot se detendrá antes de cruzar el plano. Si el plano se activa, mientras el robot se desplaza por el borde del plano, el robot puede acabar cruzando el plano y, en el peor de los casos, se detendrá según los límites de distancia y tiempo de parada configurados. Cuando el plano esté activado y el robot haya cruzado el plano, el robot se detendrá de acuerdo con los límites configurados de distancia de parada y tiempo de parada.
|
|
|
|
|
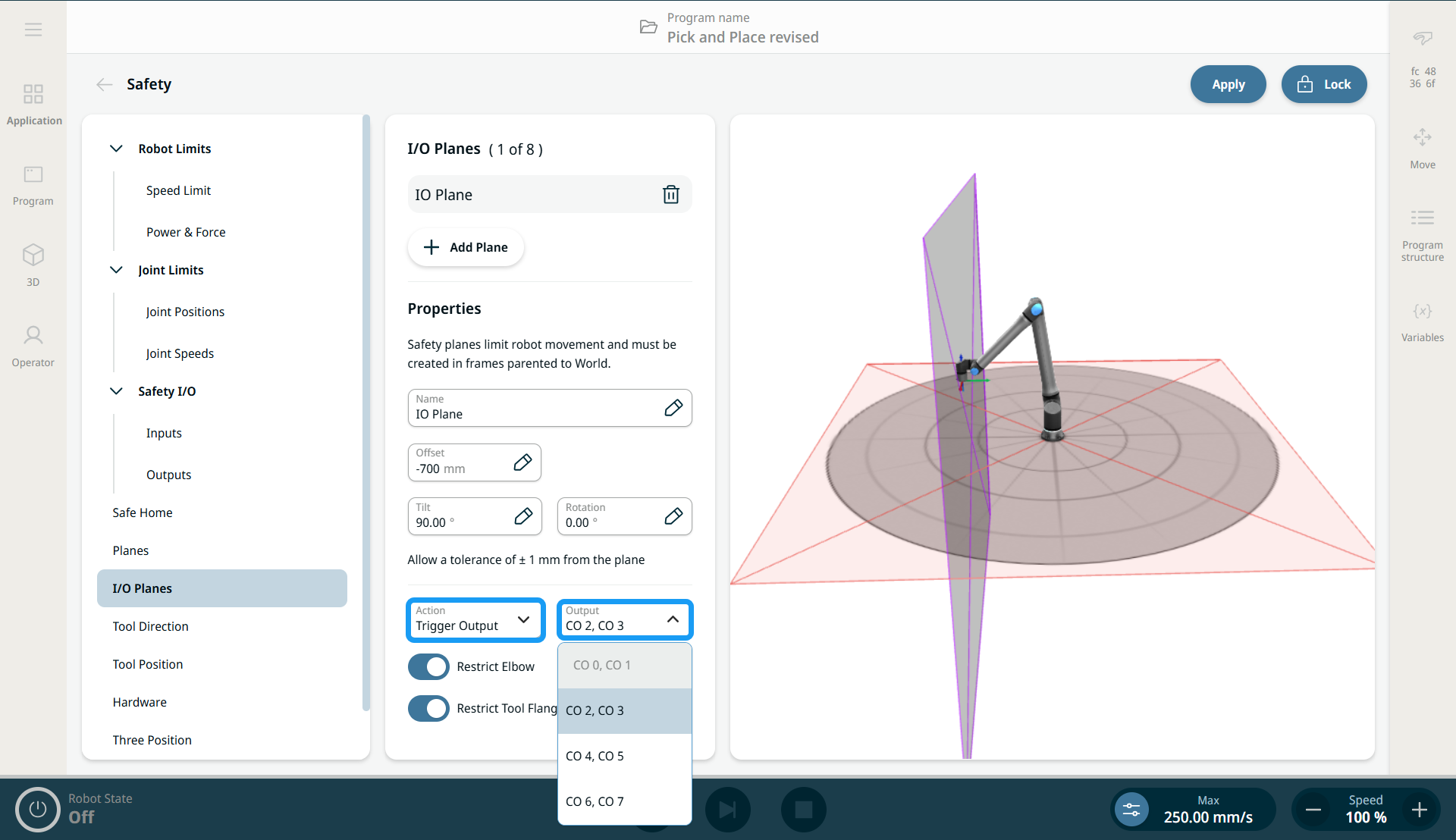
Plano de salida |
Trigger Output genera una salida de seguridad en función de si una o varias esferas de seguridad han cruzado el plano. Cuando una o varias de las esferas de seguridad han atravesado un plano definido como salida de disparo, se activa la salida de seguridad correspondiente a ese plano. "Activado" significa que las salidas de seguridad están eléctricamente en "Bajo". Cuando alguna de las esferas de seguridad ha cruzado un plano definido como salida de disparo, se activa la salida de seguridad correspondiente a ese plano.
|