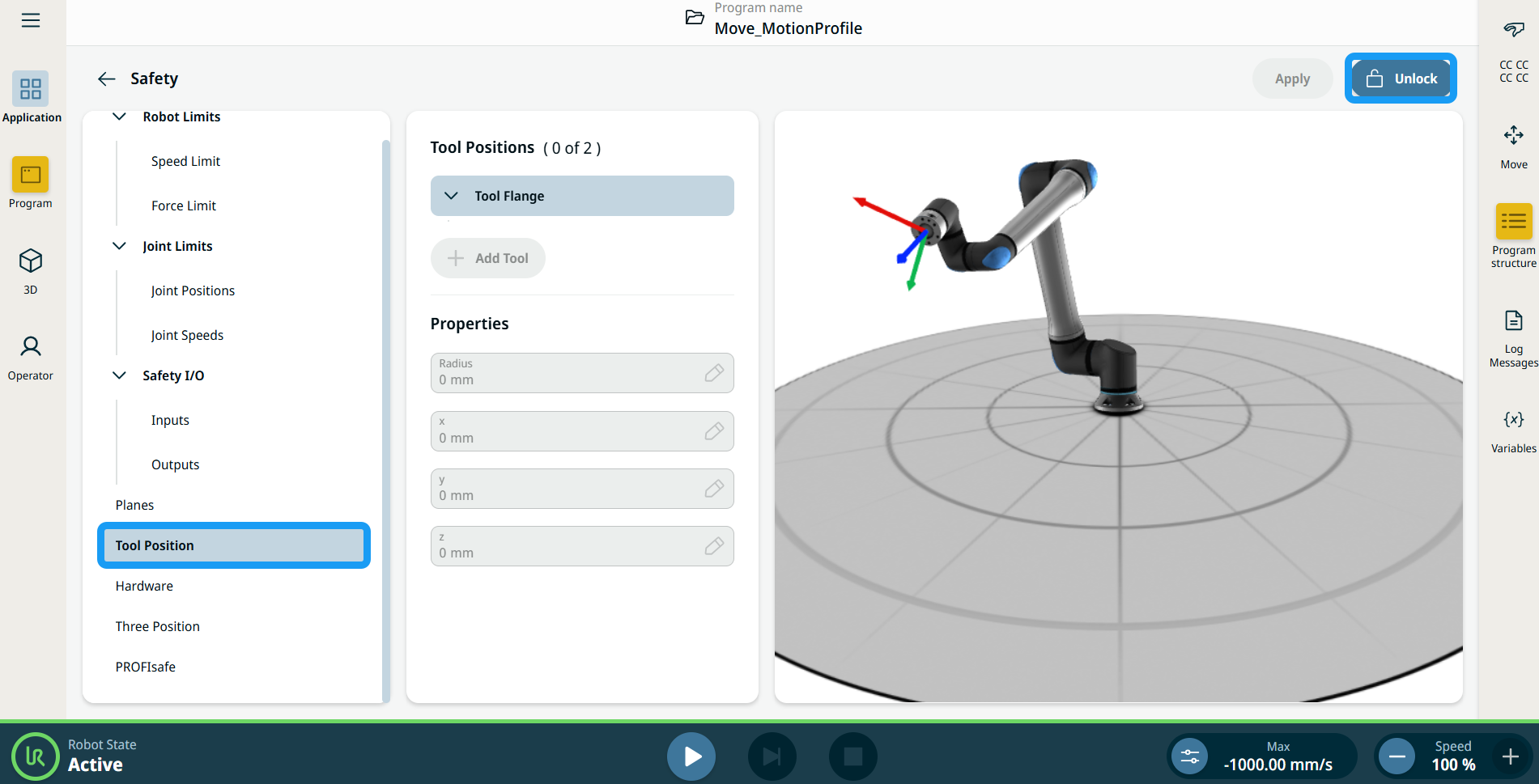
Restricción de la posición de la herramienta
| Detalles |
La posición de la herramienta tiene dos beneficios clave:
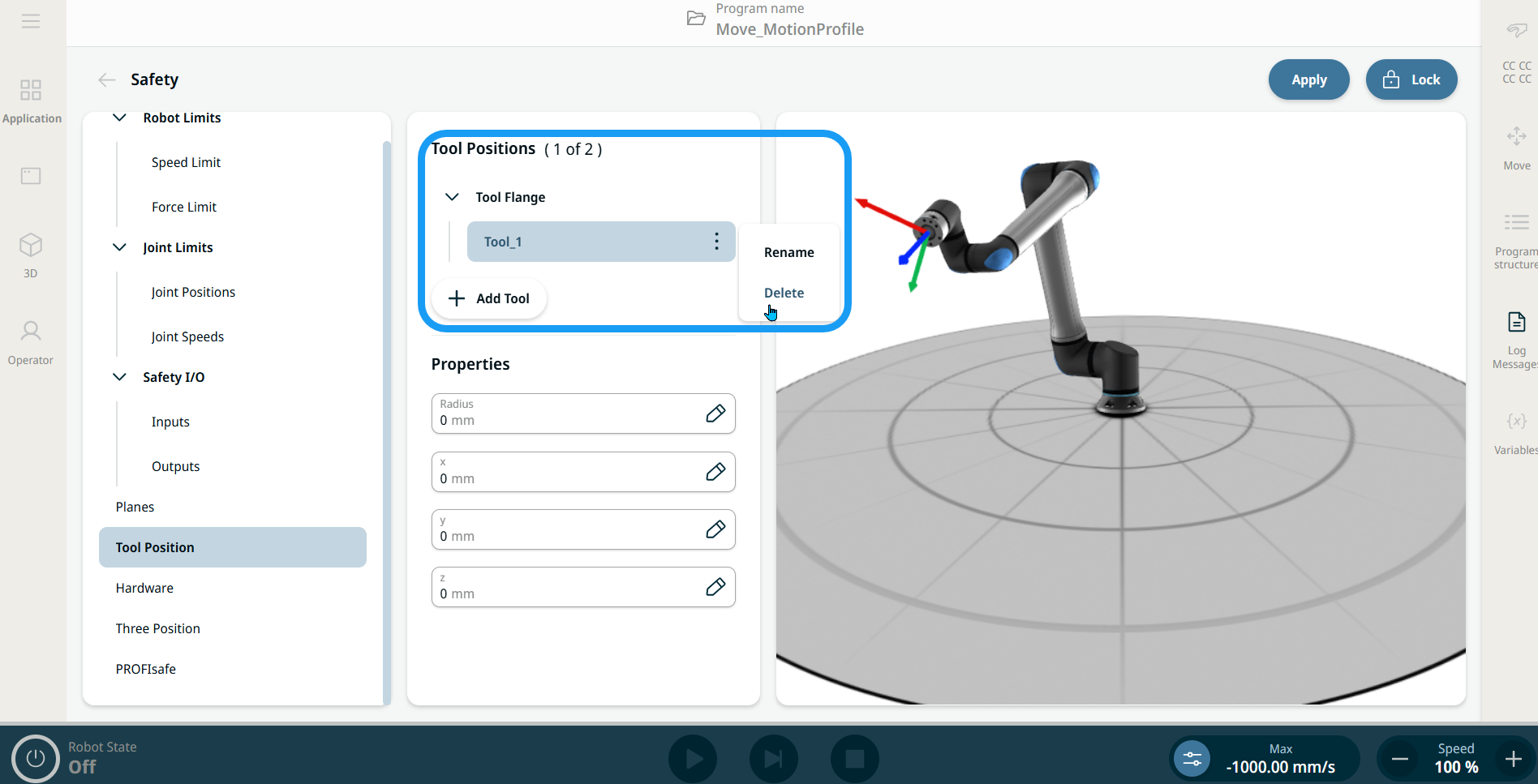
Puede definir, configurar y gestionar hasta dos posiciones de herramienta.
|
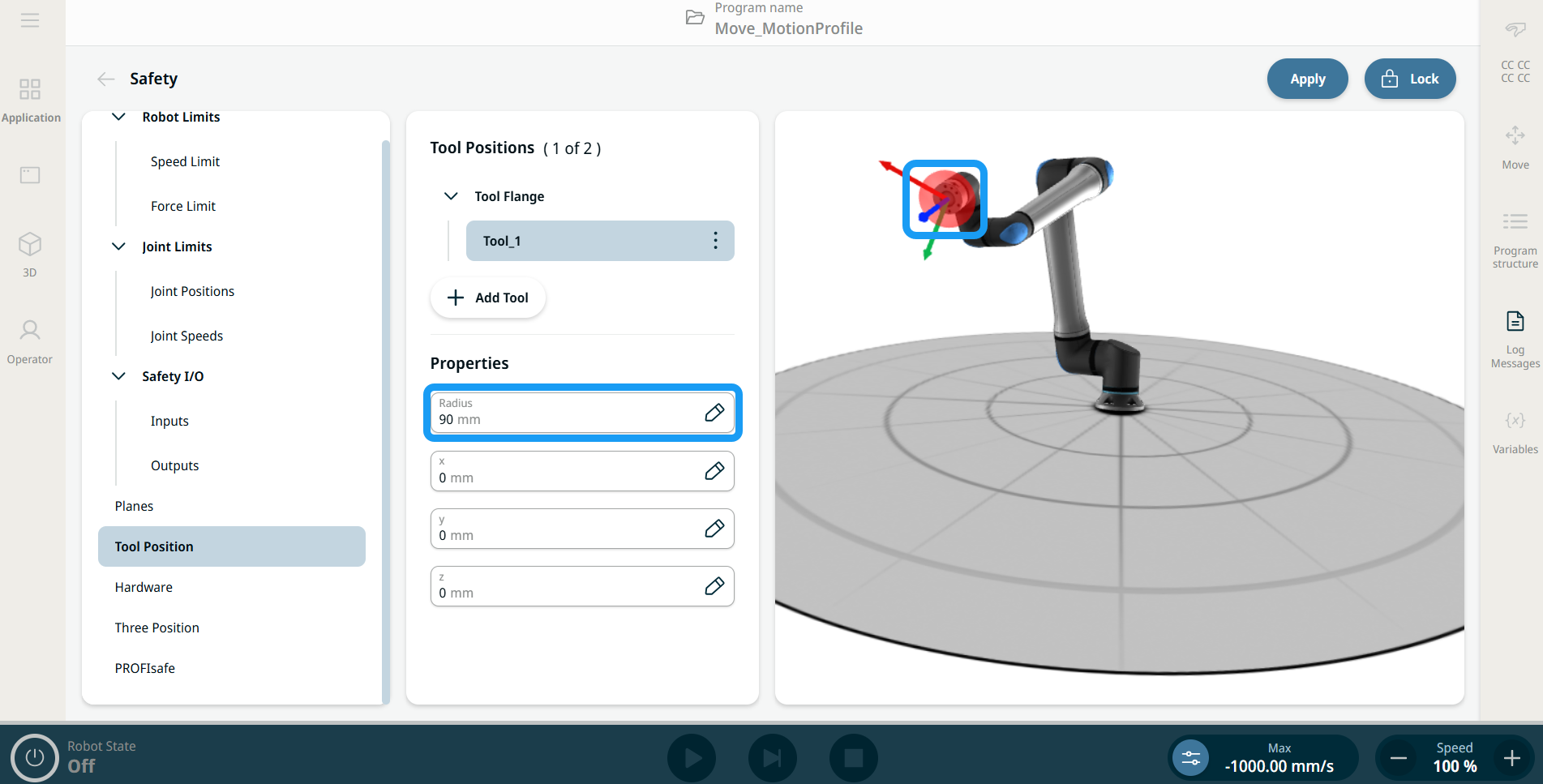
| Herramientas definidas por el usuario |
Para las herramientas definidas por el usuario, el usuario puede cambiar:
|
|
Para acceder a la posición de la herramienta |
|
|
|
|
|
|
|