E/S de seguridad
| Descripción |
Las E/S están dividas en entradas y salidas y emparejadas para que cada función proporcione una clasificación PLd de Categoría 3.
Al iniciar programas desde una entrada de E/S o bus de campo, el robot puede comenzar el movimiento desde la posición que tiene, no habrá ningún movimiento manual hasta el primer punto de paso a través del PolyScope requerido.
|
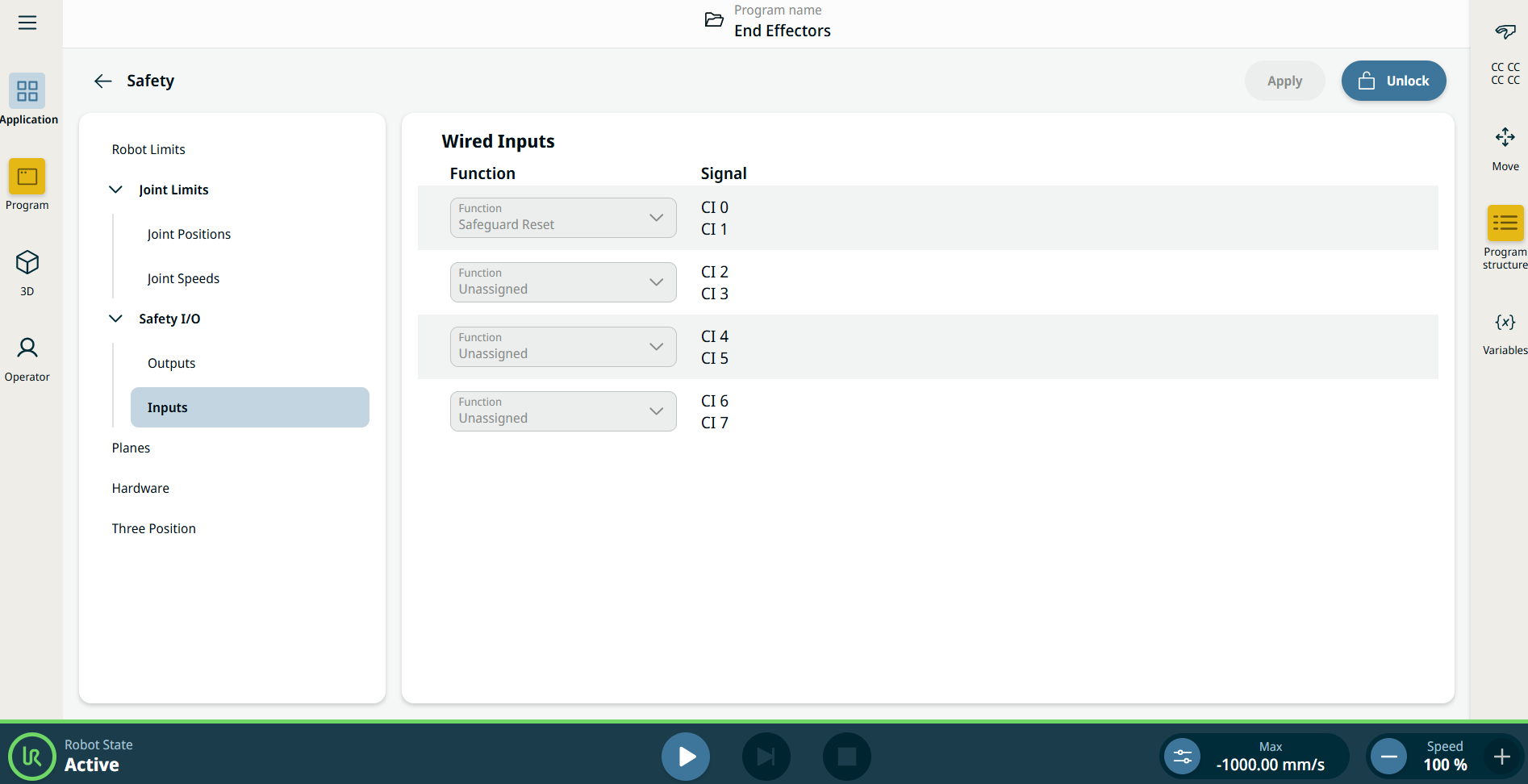
| Entradas de la caja de control |
Las entradas se describen en la tabla siguiente:
Cuando el restablecimiento de protección predeterminado está desactivado, se produce un restablecimiento automático cuando la protección ya no activa una parada. Esto puede suceder si una persona pasa a través del campo de la protección. Si una persona no es detectada por la protección y la persona está expuesta a peligros, las normas prohíben el restablecimiento automático.
Cuando la parada de seguridad en modo automático está habilitada, no se activa una parada de seguridad en modo manual.
|
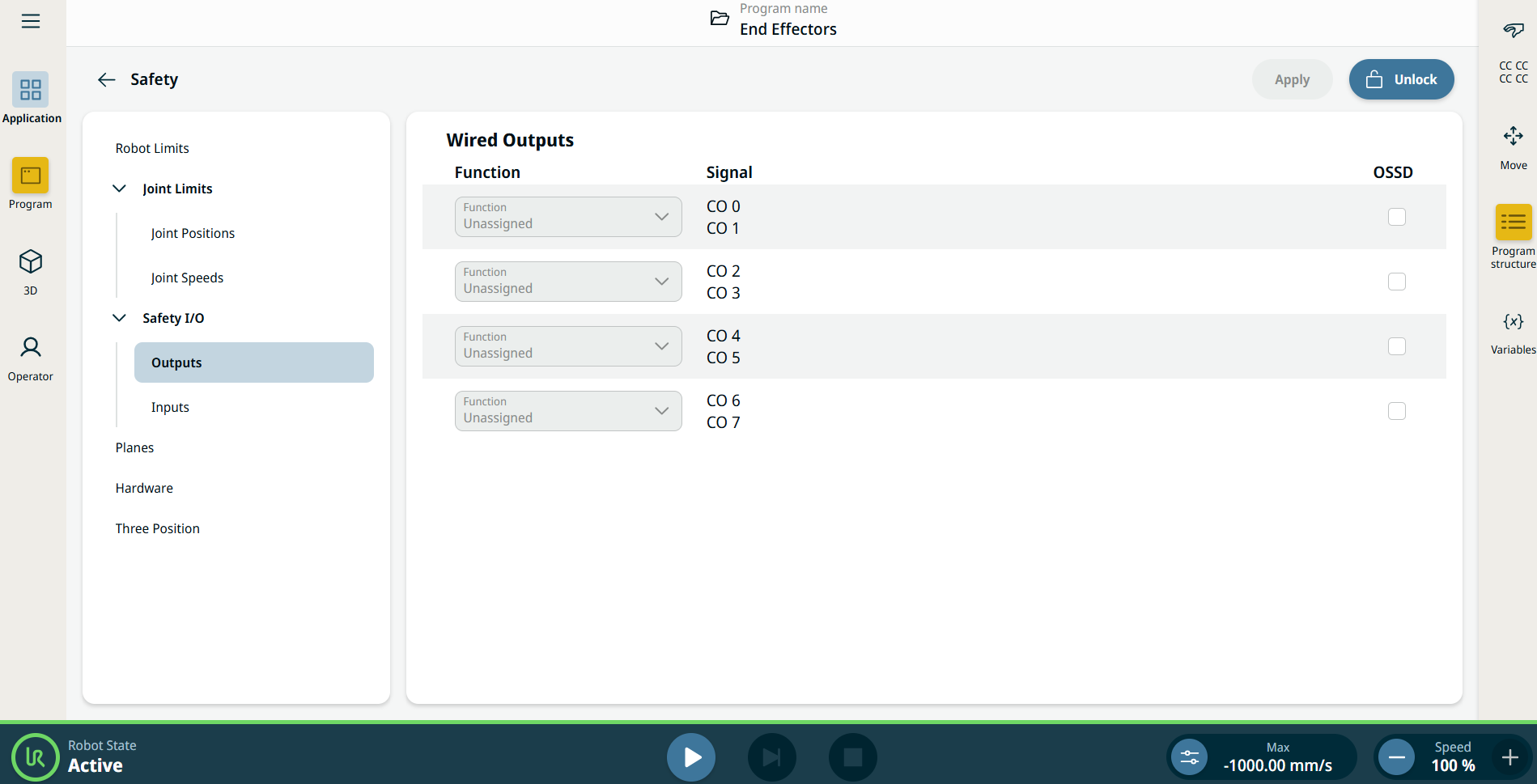
| Salidas de la caja de control |
Todas las salidas de seguridad se vuelven bajas en caso de infracción o fallo en el sistema de seguridad. Esto significa que la salida de parada del sistema inicia una parada aunque no se active una parada de emergencia. Puede usar las siguientes funciones de seguridad para las señales de salida. Todas las señales vuelven a ser bajas cuando termina el estado que activó la señal alta:
Cualquier máquina externa que reciban el estado Parada de emergencia a través del robot mediante la salida Parada de emergencia debe cumplir la norma ISO 13850. Esto es especialmente necesario en las configuraciones donde la entrada Parada de emergencia de robot se conecta a un dispositivo externo Parada de emergencia. En estos casos, la salida Parada del sistema será alta cuando se libere el dispositivo externo Parada de emergencia. Esto implica que el estado de parada de emergencia de las máquinas externas se restablecerá sin que haga falta ninguna acción manual por parte del operador del robot. Por lo tanto, para cumplir con las normas de seguridad, es necesario que las máquinas externas exijan una acción manual con el fin de reanudar su funcionamiento.
|