Measuring Positions and Calibration Statistics
| Description |
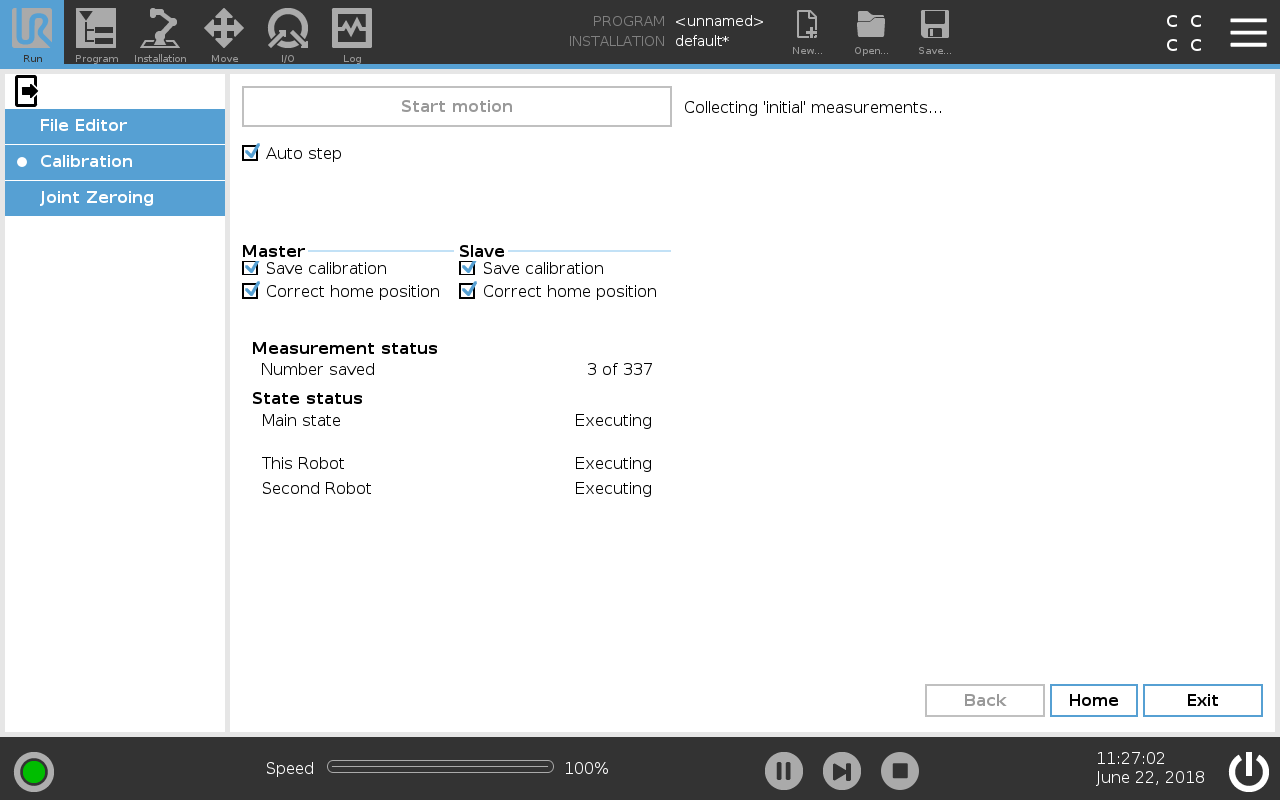
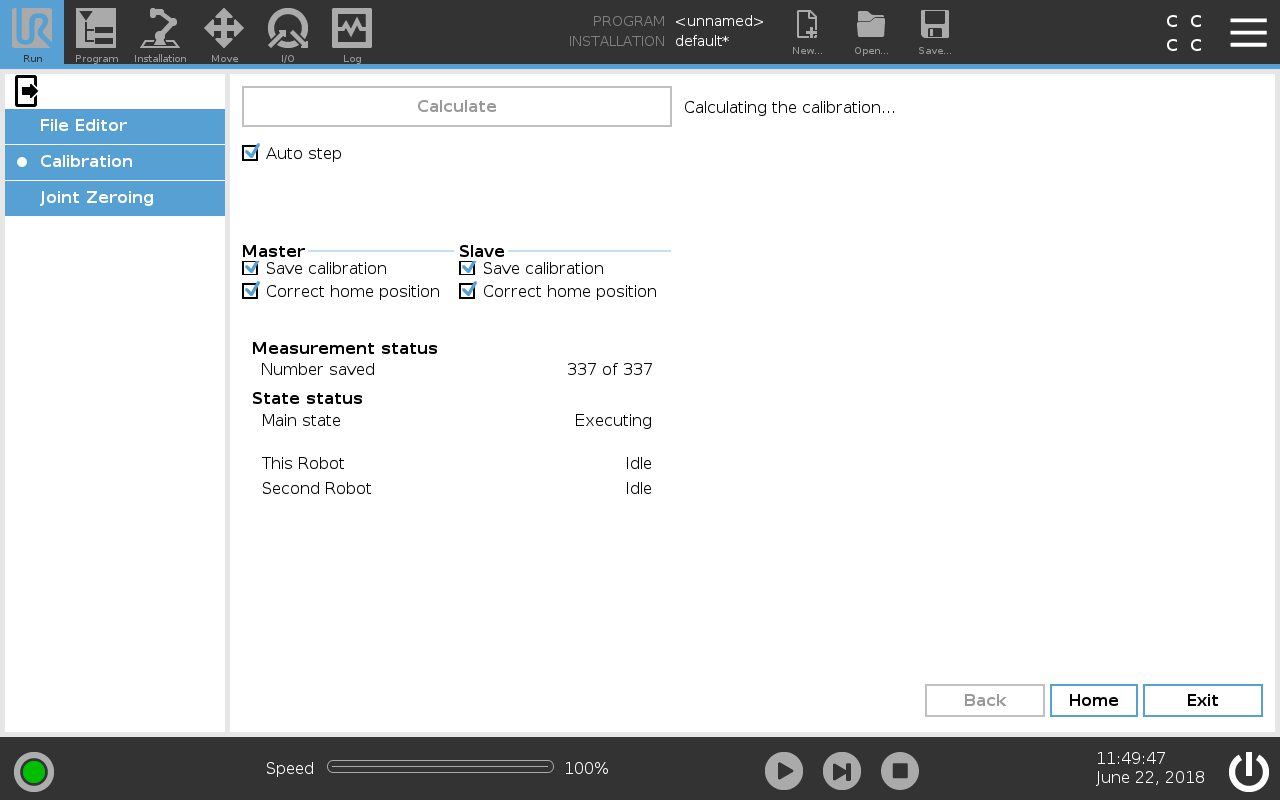
Measurements are collected during dual calibration as the robots continue to move around. A preliminary calibration is calculated, then replaced by the final calibration calculation.
|
| Collecting the measurements |
|
| Calculating the calibration |
|
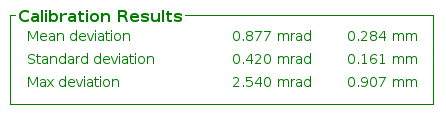
| Calibration Results |
At the end of the dual calibration, a Calibration Results box provides a report on the success of the calibration. If the Calibration Results box appears as green text, the calibration was successful. If the Calibration Results box appears as red text, the calibration was unsuccessful, and the procedure continues. This is an example. The Calibration Results provide statistics in millimeters (mm) and milliradians (mrad) that refer to the RMS deviation in Cartesian space, as follows:
|