Gripper Open Function
| Description |
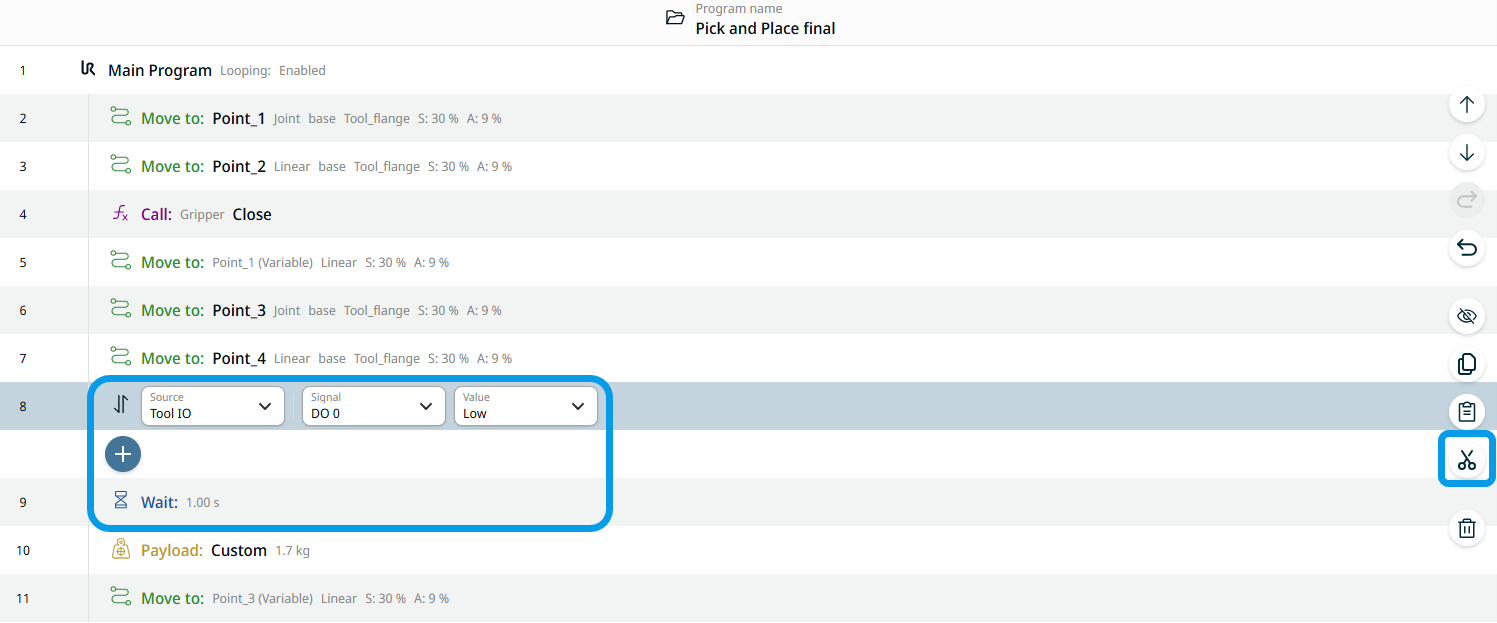
A gripper open function ensures that right timing to open the gripper is applied.
|
|
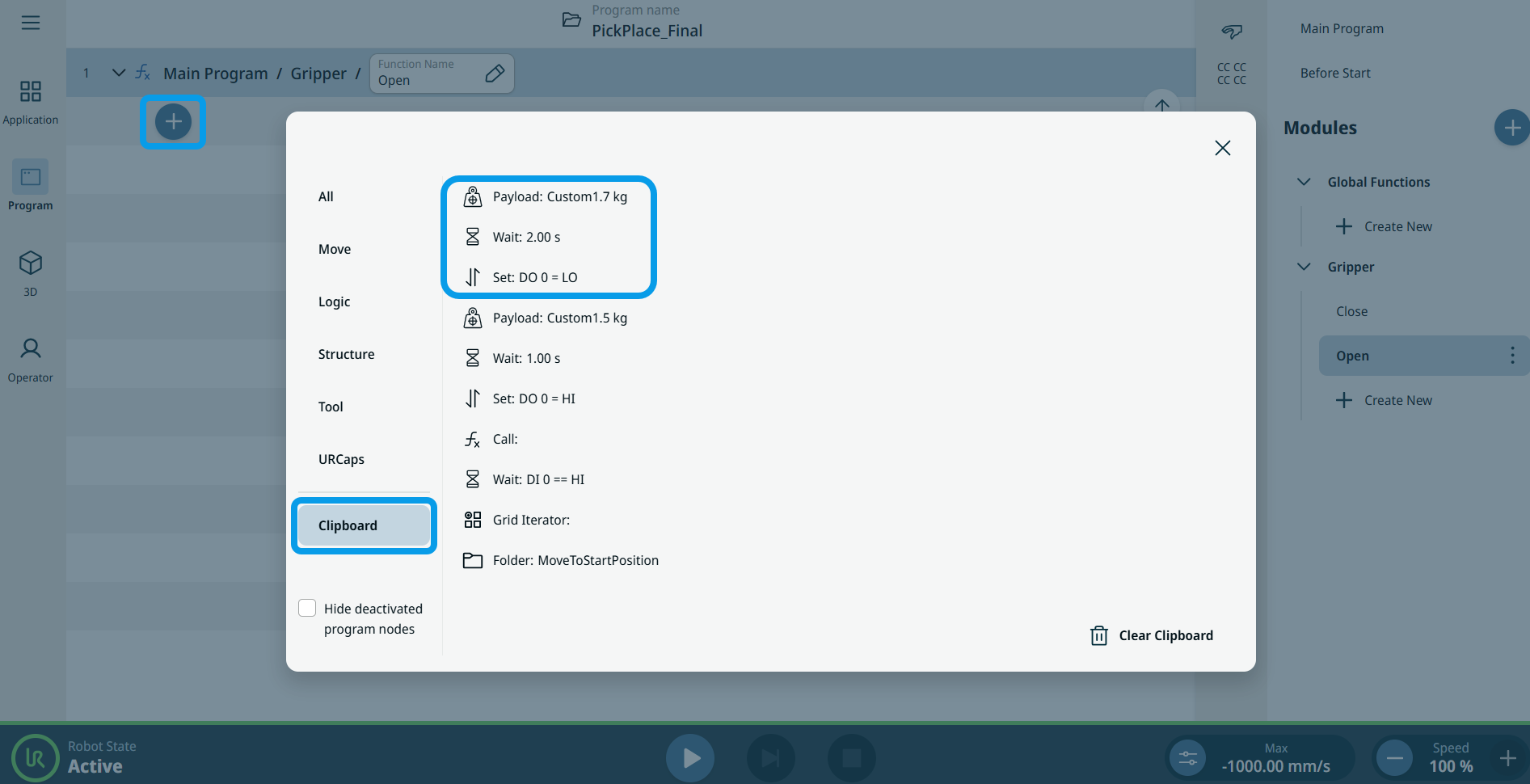
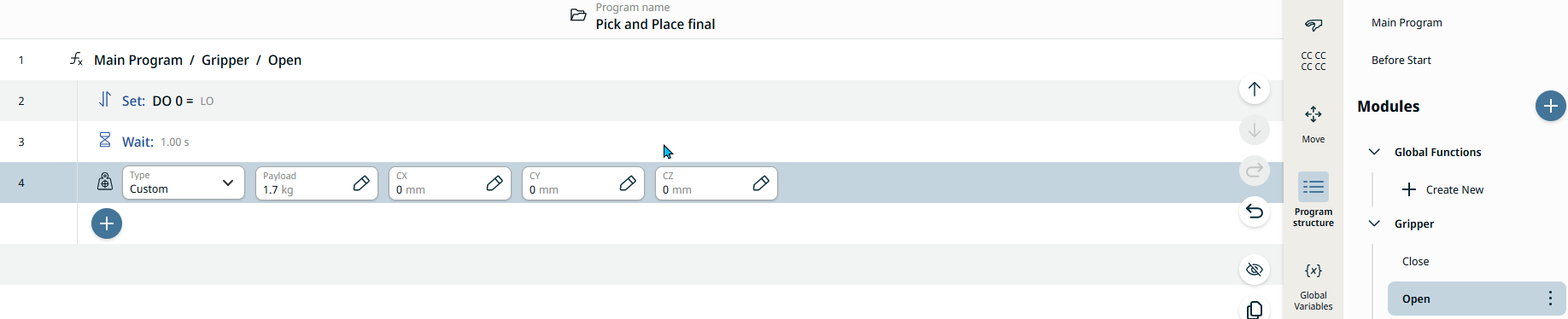
To create Open Gripper Function |
|
|
|
|
|
|
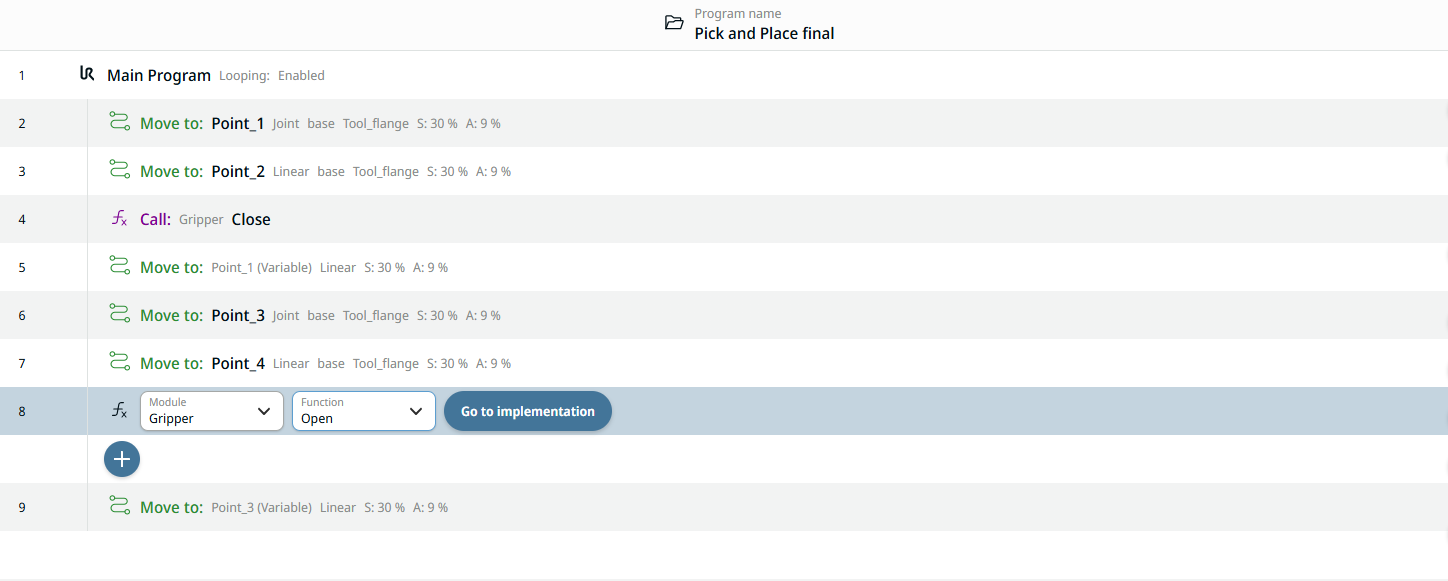
You are able to program a Gripper Open Function once, and whenever you need to open the gripper, just call the function. This is now how your program tree appears with the applied module and functions, but with the same robot movement as before:
|