
Wait for input, time or... (Wait command)
Make the program wait for an input, a given time or something else before proceeding.
Examples are valid for:
CB2 Software version: 1.8.16941
CB3 Software version: 3.1.17779
e-Series Software version: All versions
Note that older or newer software versions may behave differently.
The Wait-command can make the robot program wait for a given time, before proceeding.
It can also be used to wait for a an input to have a defined state, before moving on.
- Go to the "Program"-tab (1) in the Program Robot section.
Click the "Structure"-tab (2) to find a pallette of the available commands.
Find and click the "Wait"-command (3) in the commands pallette.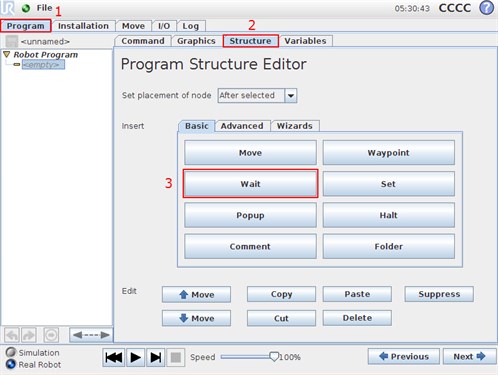
- A Wait-command is inserted into the program tree to the left.
Mark the "Wait" command in the program tree and click the "Command" tab to see details for this command.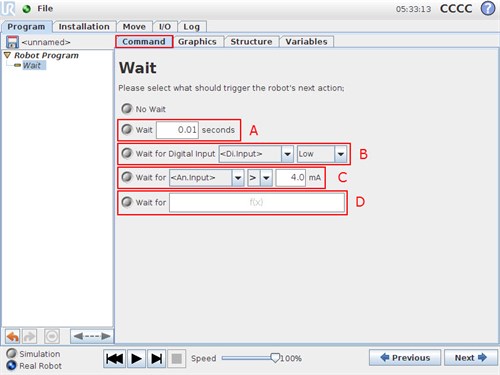
The Wait command gives 4 options:
A) Wait for a time, given in seconds.
Program moves on, when time has passed.
B) Wait for a digital input to have a given state.
E.g. Digital Input 0 to be high.
Program waits here until state is reached.
C) Wait for an analog input to have a given value.
If the analog input in the "I/O" tab is set to "Current" value is in mA.
If the analog input in the "I/O" tab is set to "Voltage" value is in Volts.
Program waits here until the value is higher/lower than given value.
D) Wait for a logic expression.
This enables to make the robot e.g. wait for digital input 1 to be high and analog input 0 to be lower than 4 Volts before proceeding.
The robot can also wait for a variable to have a defined value. - In this example, we will choose to wait for Digital Input 0 to be high, before proceeding.
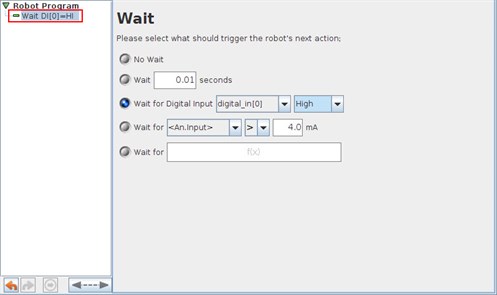
The program node in the program tree now turns to green, which means the command is defined.