
UR Polyscope: Move with respect to a custom feature/frame
Demonstrates how to Move with respect to a custom feature/frame via UR Polyscope
Examples are valid for:
CB2 Software version: 1.8.16941
CB3 Software version: 3.1.17779
e-Series Software version: All versions
Note that older or newer software versions may behave differently.
These examples can be used for both CB2, CB3 and e-Series.
It is possible to move with respect to a custom feature (point, line or plane) using the Polyscope interface.
example : the code below is to move the robot 10cm along the Z-axis of the tool.
new_pose = p[0,0,0.1,0,0,0]
MoveL
new_pose
The pose variable is of the format p[x,y,z,Rx,Ry,Rz] where the distance values are in metres and the angle values are in radians.
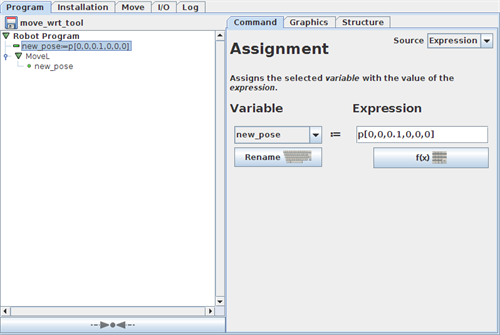
Once the pose variable is created:-
When using a pose variable, keep in mind that it can be with respect to any default features or any custom feature you create. Once you create a pose variable do the following:-
- Add a “move” command and change it to a MoveL
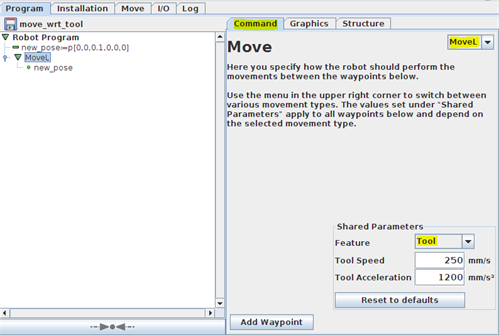
- Change the feature for this MoveL to "Tool" from the drop down on the bottom right of the command tab (You can select custom features as well)
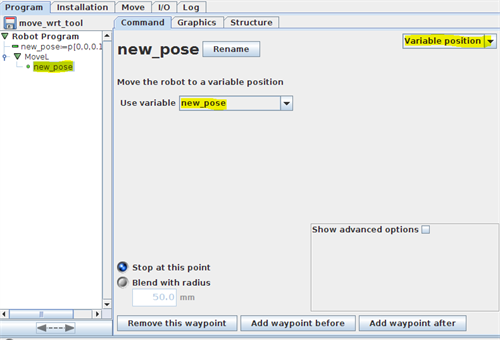
- Change waypoint type to variable position from drop down on top right of command tab, and select the variable you created (See image on next page)
You are now ready to write a program to move the Universal Robot with respect to any feature. Remember practise makes perfect. Play around to get a better understanding of the concept. This is a powerful tool and will come in handy when integrating with vision and writing custom script based dynamic programs. Have fun!