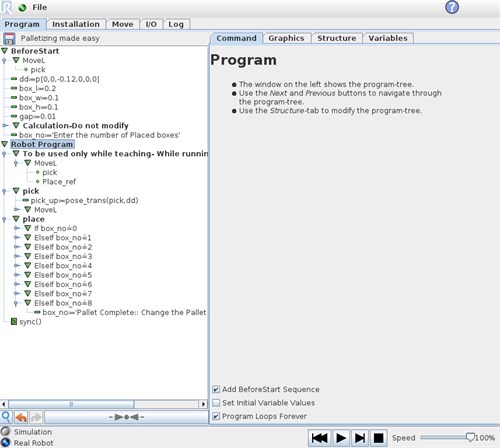
Program Example for Mixed Orientation pallet without using Pallet Wizard
Mixed Orientation Pallet
Example is valid for:
CB2 Software version: 1.8.16941
CB3 Software version: 3.1.17779
Note that older or newer software versions may behave differently.
This example can be used for both CB2 and for CB3.
Introduction:
- Only 2 waypoints will be used while programming the pallet.
-
All other positions will be calculated in offsets in calculation Folder.
-
All offsets will be calculated in terms of box dimensions, if we change the box dimensions entire pallet will shift automatically and should be able to adjust all positions proportionally.
-
No need to do teaching for Left & right pallet individually. Program itself should take care of both the pallets

Description of Variable used in Program:
PALLET EXAMPLE:
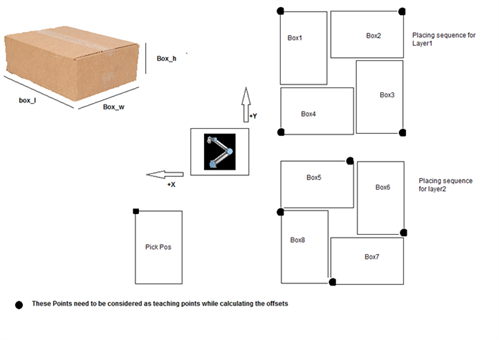
Modification in Calculation Folder:
box1≔Place_ref
box1_up≔pose_trans(box1,dd)
box2≔pose_trans(box1,p[-(box_l+box_w+gap),0,0,0,0,d2r(90)])
box2_up≔pose_trans(box2,dd)
box3≔pose_trans(box2,p[0,-(box_l+box_w+gap),0,0,0,d2r(90)])
box3_up≔pose_trans(box3,dd)
box4≔pose_trans(box3,p[(box_l+box_w+gap),0,0,0,0,d2r(90)])
box4_up≔pose_trans(box4,dd)
box5≔pose_trans(box1,p[-(box_l-box_w),0,-box_h,0,0,d2r(90)])
box5_up≔pose_trans(box5,dd)
box6≔pose_trans(box2,p[0,-(box_l-box_w),-box_h,0,0,d2r(90)])
box6_up≔pose_trans(box6,dd)
box7≔pose_trans(box3,p[(box_l-box_w),0,-box_h,0,0,d2r(90)])
box7_up≔pose_trans(box7,dd)
box8≔pose_trans(box4,p[0,(box_l-box_w),-box_h,0,0,d2r(90)])
box8_up≔pose_trans(box8,dd)
This Sample program will be much simple and it can be developed offline. For more info on Pose_trans. Please refer to Script manual on download section