
DH Parameters for calculations of kinematics and dynamics
Denavit Hartenberg Parameters - DH Parameters
Denavit–Hartenberg parameters are used to calculate kinematics and dynamics of UR robots.
The definition of the Denavit–Hartenberg parameters can be found here: http://en.wikipedia.org/wiki/Denavit%E2%80%93Hartenberg_parameters
Animation to explain the Denavit–Hartenberg parameters: https://www.youtube.com/watch?v=rA9tm0gTln8
Note: UR “a” parameter = Wikipedia “r” parameter.
The Denavit–Hartenberg parameters in UR robots are described as the below diagrams.

The Denavit–Hartenberg parameters of UR robots are shown as below.
It should be noted that the inertia matrix values for UR3e and UR5e are negligible due to their smaller size. The inertia starts having effect from UR10 and upwards.
| UR8 Long | |||||||
| Kinematics | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0.2186 | π/2 | Link 0 | 9.9883 | [0.000024, -0.033309, 0.025304] | [0.051334, 0.000025, -0.000016, 0.000025, 0.047702, 0.008805, -0.000016, 0.008805, 0.034263] |
| Joint 2 | -0.8989 | 0 | 0 | Link 1 | 17.0738 | [0.565429, -0.000074, 0.19542] | [0.056709, 0.000292, -0.054852, 0.000292, 2.44012, -0.000014, -0.054852, -0.000014, 2.432744] |
| Joint 3 | -0.7149 | 0 | 0 | Link 2 | 7.6393 | [0.416102, 0.000058, 0.065663] | [0.022148, 0.000052, 0.019779, 0.000052, 0.633274, 0.000003, 0.019779, 0.000003, 0.625889] |
| Joint 4 | 0 | 0.1824 | π/2 | Link 3 | 2.0890 | [0.000025, -0.019695, 0.016413] | [0.004339, 0.000019, 0.000001, 0.000019, 0.002548, 0.000706, 0.000001, 0.000706, 0.003912] |
| Joint 5 | 0 | 0.1361 | -π/2 | Link 4 | 2.0869 | [0.000025, 0.019960, 0.015886] | [0.004288, 0.000017, -0.000003, 0.000017, 0.002566, -0.000716, -0.000003, -0.000716, 0.003927] |
| Joint 6 | 0 | 0.1434 | 0 | Link 5 | 1.0666 | [-0.000018, -0.000112, -0.053397] | [0.001406, -0.000003, 0.000001, -0.000003, 0.001404, -0.000024, 0.000001, -0.000024, 0.001002] |
For UR15 see attached file HERE.
| UR15 | |||||||
| Kinematics | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0.2186 | π/2 | Link 0 | 9.9883 | [0.000024, -0.033309, 0.025304] | [0.051334, 0.000025, -0.000016, 0.000025, 0.047702, 0.008805, -0.000016, 0.008805, 0.034263] |
| Joint 2 | -0.6475 | 0 | 0 | Link 1 | 14.9255 | [0.419009, -0.000083, 0.192787] | [0.048202, 0.000232, -0.032135, 0.000232, 1.188499, -0.000017, -0.032135, -0.000017, 1.182771] |
| Joint 3 | -0.5164 | 0 | 0 | Link 2 | 6.1015 | [0.305471, 0.000019, 0.070552] | [0.018481, -0.000005, 0.013601, -0.000005, 0.303502, 0.000003, 0.013601, 0.000003, 0.296843] |
| Joint 4 | 0 | 0.1824 | π/2 | Link 3 | 2.0890 | [0.000025, -0.019695, 0.016413] | [0.004339, 0.000019, 0.000001, 0.000019, 0.002548, 0.000706, 0.000001, 0.000706, 0.003912] |
| Joint 5 | 0 | 0.1361 | -π/2 | Link 4 | 2.0869 | [0.000025, 0.019960, 0.015886] | [0.004288, 0.000017, -0.000003, 0.000017, 0.002566, -0.000716, -0.000003, -0.000716, 0.003927] |
| Joint 6 | 0 | 0.1434 | 0 | Link 5 | 1.0666 | [-0.000018, -0.000112, -0.053397] | [0.001406, -0.000003, 0.000010, -0.000003, 0.001404, -0.000024, 0.000010, -0.000024, 0.001002] |
For UR18:
| UR18 | |||||||
| Kinematics | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0.2186 | π/2 | Link 0 | 9.9883 | [2.4e-05, -0.033309, 0.025304] | [0.051334, 2.5e-05, -1.6e-05] [2.5e-05, 0.047702, 0.008805] [-1.6e-05, 0.008805, 0.034263] |
| Joint 2 | -0.475 | 0 | 0 | Link 1 | 14.2009 | [0.308664, -8.8e-05, 0.190204] | [0.045094, 0.000179, -0.024705] [0.000179, 0.630805, -2e-05] [-0.024705, -2e-05, 0.625724] |
| Joint 3 | -0.3389 | 0 | 0 | Link 2 | 5.52 | [0.199652, 2.1e-05, 0.073101] | [0.016891, 0.0, 0.009081] [0.0, 0.129732, 3e-06] [0.009081, 3e-06, 0.123451] |
| Joint 4 | 0 | 0.1824 | π/2 | Link 3 | 2.0890 | [2.5e-05, -0.019695, 0.016413] | [0.004339, 1.9e-05, 1e-06] [1.9e-05, 0.002548, 0.000706] [1e-06, 0.000706, 0.003912] |
| Joint 5 | 0 | 0.1361 | -π/2 | Link 4 | 2.0869 | [2.5e-05, -0.019695, 0.016413] | [0.004288, 1.7e-05, -3e-06] [1.7e-05, 0.002566, -0.000716] [-3e-06, -0.000716, 0.003927] |
| Joint 6 | 0 | 0.1434 | 0 | Link 5 | 1.0666 | [-1.8e-05, -0.000112, -0.053397] | [0.001406, -3e-06, 1e-05] [-3e-06, 0.001404, -2.4e-05] [1e-05, -2.4e-05, 0.001002] |
For UR20 see attached file HERE.
| UR20 | |||||||
| Kinematics | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0.2363 | π/2 | Link 0 | 16.343 | [0, -0.0610, 0.0062] | [0.0887, -0.0001, -0.0001, -0.0001, 0.0763, 0.0072, -0.0001, 0.0072, 0.0842] |
| Joint 2 | -0.8620 | 0 | 0 | Link 1 | 29.632 | [0.5226, 0, 0.2098] | [0.1467, 0.0002, -0.0516, 0.0002, 4.6659, 0.0000, -0.0516, 0.0000, 4.6348] |
| Joint 3 | -0.7287 | 0 | 0 | Link 2 | 7.879 | [0.3234, 0, 0.0604] | [0.0261, -0.0001, -0.0290, -0.0001, 0.7576, -0.0000, -0.0290, -0.0000, 0.7533] |
| Joint 4 | 0 | 0.2010 | π/2 | Link 3 | 3.054 | [0, -0.0026, 0.0393] | [0.0056, -0.0000, -0.0000, -0.0000, 0.0054, 0.0004, -0.0000, 0.0004, 0.0040] |
| Joint 5 | 0 | 0.1593 | -π/2 | Link 4 | 3.126 | [0, 0.0024, 0.0379] | [0.0059, -0.0000, 0.0000, -0.0000, 0.0058, -0.0004, 0.0000, -0.0004, 0.0043] |
| Joint 6 | 0 | 0.1543 | 0 | Link 5 | 0.846 | [0, -0.0003, -0.0318] | [0.0009, 0.0000, 0.0000, 0.0000, 0.0009, 0.0000, 0.0000, 0.0000, 0.0012] |
For UR30 see attached file HERE.
| UR30 | |||||||
| Kinematics | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0.2363 | π/2 | Link 0 | 16.343 | [-0.0001, -0.0600, 0.0069] | [0.0883, -0.0001, -0.0001, -0.0001, 0.0764, 0.0076, -0.0001, 0.0076, 0.0830] |
| Joint 2 | -0.6370 | 0 | 0 | Link 1 | 28.542 | [0.3894, 0, 0.2103] | [0.1379, 0.0001, -0.0451, 0.0001, 2.5013, -0.0000, -0.0451, -0.0000, 2.4751] |
| Joint 3 | -0.5037 | 0 | 0 | Link 2 | 7.156 | [0.2257, 0, 0.0629] | [0.0236, 0.0000, -0.0168, 0.0009, 0.3388, 0.0001, -0.0168, 0.0001, 0.3353] |
| Joint 4 | 0 | 0.2010 | π/2 | Link 3 | 3.054 | [0, -0.0048, 0.0353] | [0.0056, 0.0000, 0.0000 0.0000, 0.0051, 0.0006 0.0000, 0.0006, 0.0043] |
| Joint 5 | 0 | 0.1593 | -π/2 | Link 4 | 3.126 | [0, 0.0046, 0.0341] | [0.0060, 0.0000, 0.0000, 0.0000, 0.0056, -0.0006, 0.0000, -0.0006, 0.0046] |
| Joint 6 | 0 | 0.1543 | 0 | Link 5 | 0.926 | [0, 0, -0.0293] | [0.0009, 0.0000, 0.0000, 0.0000, 0.0009, 0.0000, 0.0000, 0.0000, 0.0012] |
| UR3e | |||||||
| Kinematics | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0.15185 | π/2 | Link 1 | 1.98 | [0, -0.02, 0] | 0 |
| Joint 2 | -0.24355 | 0 | 0 | Link 2 | 3.4445 | [0.13, 0, 0.1157] | 0 |
| Joint 3 | -0.2132 | 0 | 0 | Link 3 | 1.437 | [0.05, 0, 0.0238] | 0 |
| Joint 4 | 0 | 0.13105 | π/2 | Link 4 | 0.871 | [0, 0, 0.01] | 0 |
| Joint 5 | 0 | 0.08535 | -π/2 | Link 5 | 0.805 | [0, 0, 0.01] | 0 |
| Joint 6 | 0 | 0.0921 | 0 | Link 6 | 0.261 | [0, 0, -0.02] | [0, 0, 0, 0, 0, 0, 0, 0, 0.0001] |
| UR5e/UR7e | |||||||
| Kinematics | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0.1625 | π/2 | Link 1 | 3.761 | [0, -0.02561, 0.00193] | 0 |
| Joint 2 | -0.425 | 0 | 0 | Link 2 | 8.058 | [0.2125, 0, 0.11336] | 0 |
| Joint 3 | -0.3922 | 0 | 0 | Link 3 | 2.846 | [0.15, 0.0, 0.0265] | 0 |
| Joint 4 | 0 | 0.1333 | π/2 | Link 4 | 1.37 | [0, -0.0018, 0.01634] | 0 |
| Joint 5 | 0 | 0.0997 | -π/2 | Link 5 | 1.3 | [0, 0.0018,0.01634] | 0 |
| Joint 6 | 0 | 0.0996 | 0 | Link 6 | 0.365 | [0, 0, -0.001159] | [0, 0, 0, 0, 0, 0, 0, 0, 0.0002] |
| UR10e/UR12e | |||||||
| Kinematics | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0.1807 | π/2 | Link 1 | 7.369 | [0.021, 0.000, 0.027] | [0.0341, 0.0000, -0.0043, 0.0000, 0.0353, 0.0001, -0.0043, 0.0001, 0.0216] |
| Joint 2 | -0.6127 | 0 | 0 | Link 2 | 13.051 | [0.38, 0.000, 0.158] | [0.0281, 0.0001, -0.0156, 0.0001, 0.7707, 0.0000, -0.0156, 0.0000, 0.7694] |
| Joint 3 | -0.57155 | 0 | 0 | Link 3 | 3.989 | [0.24, 0.000, 0.068] | [0.0101, 0.0001, 0.0092, 0.0001, 0.3093, 0.0000, 0.0092, 0.0000, 0.3065] |
| Joint 4 | 0 | 0.17415 | π/2 | Link 4 | 2.1 | [0.000, 0.007, 0.018] | [0.0030, -0.0000, -0.0000, -0.0000, 0.0022, -0.0002, -0.0000, -0.0002, 0.0026] |
| Joint 5 | 0 | 0.11985 | -π/2 | Link 5 | 1.98 | [0.000, 0.007, 0.018] | [0.0030, -0.0000, -0.0000, -0.0000, 0.0022, -0.0002, -0.0000, -0.0002, 0.0026] |
| Joint 6 | 0 | 0.11655 | 0 | Link 6 | 0.615 | [0, 0, -0.026] | [0.0000, 0.0000, -0.0000, 0.0000, 0.0004, 0.0000, -0.0000, 0.0000, 0.0003] |
| UR16e | |||||||
| Kinematics | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0.1807 | π/2 | Link 1 | 7.369 | [0.000, -0.016, 0.030] | [0.0335, 0.0000, -0.0000, 0.0000, 0.0337, 0.0037, -0.0000, 0.0037, 0.0210] |
| Joint 2 | -0.4784 | 0 | 0 | Link 2 | 10.450 | [0.302, 0.000, 0.160] | [0.0280, -0.0001, -0.0072, -0.0001, 0.4756, 0.0000, -0.0072, -0.0000, 0.4764] |
| Joint 3 | -0.36 | 0 | 0 | Link 3 | 4.321 | [0.194, 0.000, 0.065] | [0.0109, 0.0001, 0.0101, 0.0001, 0.1206, 0.0000, 0.0101, 0.0000, 0.11714] |
| Joint 4 | 0 | 0.17415 | π/2 | Link 4 | 2.180 | [0.000, -0.009, 0.011] | [0.0061, -0.0000, -0.0000, -0.0000, 0.0025, 0.0008, 0.0000, 0.0008, 0.0058] |
| Joint 5 | 0 | 0.11985 | -π/2 | Link 5 | 2.033 | [0.000, 0.018, 0.012] | [0.0039, -0.0000, 0.0000, -0.0000, 0.0022, -0.0005, 0.0000, -0.0005, 0.0036] |
| Joint 6 | 0 | 0.11655 | 0 | Link 6 | 0.907 | [0, 0, -0.044] | [0.0012, 0.0000, 0.0000, 0.0000, 0.0012, 0.0000, 0.0000, 0.0000, 0.0008] |
| UR3 | ||||||
| Kinematics | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] |
| Joint 1 | 0 | 0.1519 | π/2 | Link 1 | 2 | [0, -0.02, 0] |
| Joint 2 | -0.24365 | 0 | 0 | Link 2 | 3.42 | [0.13, 0, 0.1157] |
| Joint 3 | -0.21325 | 0 | 0 | Link 3 | 1.26 | [0.05, 0, 0.0238] |
| Joint 4 | 0 | 0.11235 | π/2 | Link 4 | 0.8 | [0, 0, 0.01] |
| Joint 5 | 0 | 0.08535 | -π/2 | Link 5 | 0.8 | [0, 0, 0.01] |
| Joint 6 | 0 | 0.0819 | 0 | Link 6 | 0.35 | [0, 0, -0.02] |
| UR5 | ||||||
| Kinematics | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] |
| Joint 1 | 0 | 0.089159 | π/2 | Link 1 | 3.7 | [0, -0.02561, 0.00193] |
| Joint 2 | -0.425 | 0 | 0 | Link 2 | 8.393 | [0.2125, 0, 0.11336] |
| Joint 3 | -0.39225 | 0 | 0 | Link 3 | 2.33 | [0.15, 0.0, 0.0265] |
| Joint 4 | 0 | 0.10915 | π/2 | Link 4 | 1.219 | [0, -0.0018, 0.01634] |
| Joint 5 | 0 | 0.09465 | -π/2 | Link 5 | 1.219 | [0, 0.0018,0.01634] |
| Joint 6 | 0 | 0.0823 | 0 | Link 6 | 0.1879 | [0, 0, -0.001159] |
| UR10 | ||||||
| Kinematics | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] |
| Joint 1 | 0 | 0.1273 | π/2 | Link 1 | 7.1 | [0.021, 0.000, 0.027] |
| Joint 2 | -0.612 | 0 | 0 | Link 2 | 12.7 | [0.38, 0.000, 0.158] |
| Joint 3 | -0.5723 | 0 | 0 | Link 3 | 4.27 | [0.24, 0.000, 0.068] |
| Joint 4 | 0 | 0.163941 | π/2 | Link 4 | 2 | [0.000, 0.007, 0.018] |
| Joint 5 | 0 | 0.1157 | -π/2 | Link 5 | 2 | [0.000, 0.007, 0.018] |
| Joint 6 | 0 | 0.0922 | 0 | Link 6 | 0.365 | [0, 0, -0.026] |
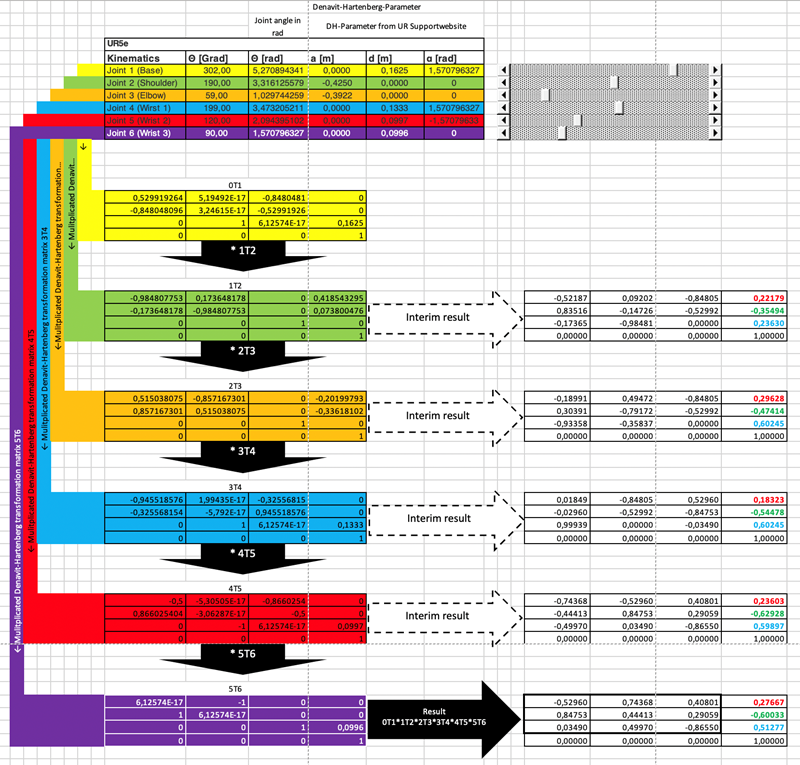
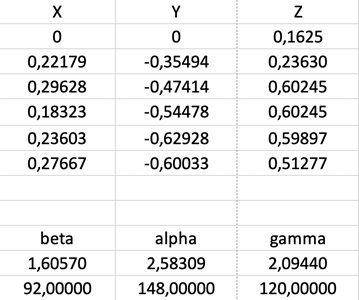
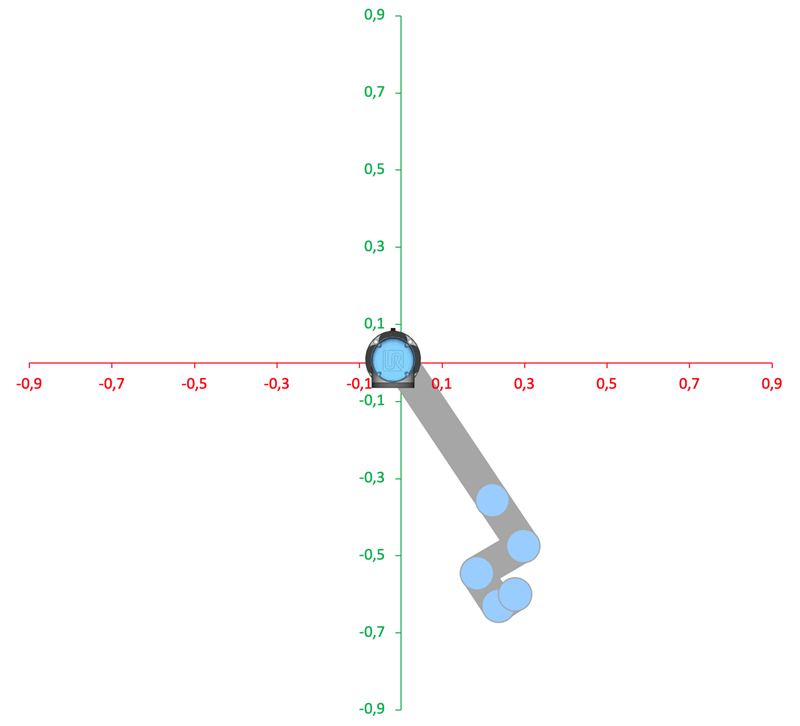
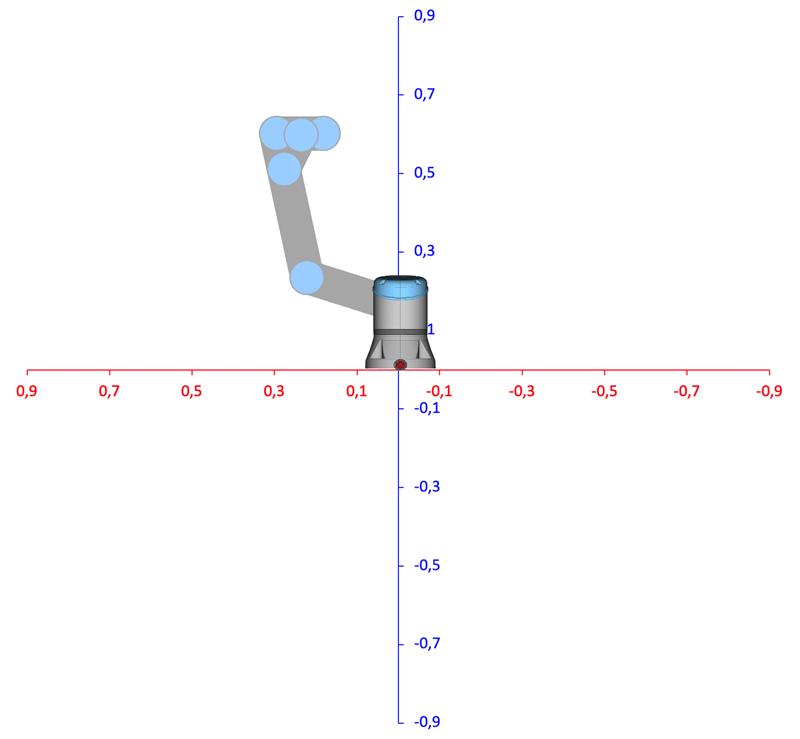
Download the excel file below for an overview and understanding how the transformation is done in regards to the position of the robot's joints.
FAQ
How is the center of mass (CoM) for each link defined?
The CoM is defined by the mass vector. The mass vector [x, y, z]^T is an offset from the given joint frame for each corresponding link.
The center of mass for each link is illustrated with the following symbol:
How is the inertia matrix for each link defined?
Each link have its own unique inertia matrix. The inertia matrix is a 3x3 symmetric matrix containing the moments of inertia and products of inertia around al three cartesian axes.
The inertia matrix is represented as:

Why are the values of delta_d so high?
The big numbers are in SI units and are due to the singular nature of the DH model. The DH representation is a complete but singular notation to define where the rotation axis is place relative to each other.
The standard DH is singular when describing parallel joints, therefore it expected to have big numbers here to represent a small angle adjustment.