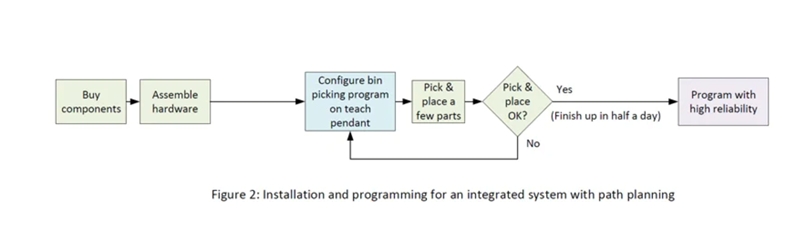
Gerçekten evrensel bir parça taşıma çözümünün uzman olmayanlar tarafından kullanılabilmesi, birkaç saat içinde konfigüre edilebilmesi, çok az veya hiç ayar gerektirmeden çalışan ve KOBİ'ler için uygun maliyetli olan gelişmiş yol planlaması sağlaması gerekir.
Energid Teknoloji, tüm karmaşıklıkları entegre yazılım tarafından yönetilen eksiksiz bir sistem sağlayarak otomatik bin picking işlemini gerçekleştiriyor. Tüm sistem bileşenleri (sensör, görüntüleme ve yol planlama yazılımı ve ortak işlemci) önceden planlanıyor ve kurulum gerektirmeden robot kontrolörüne takılıyor. Bu, kurulum süresini yalnızca bir saate indiriyor.
Tüm programlama, UR+ platformu aracılığıyla UR cobot’un Teach Pendant ile entegre ediliyor ve böylece, aynı programlama ara yüzünü kullanan standart robot komutlarıyla parça taşıma eylemlerinin gerçekleşmesini sağlar. Eğitim süresi minimumdur. Kurulum ve programlama, bir insan operatörün geçmesi gereken eğitimi taklit eden bir dizi sihirbaz tarafından yönlendirilir. Örneğin, bir parça nasıl alınır, nereye bırakılır, kaçınılması gereken engeller vb.
OTOMATİK YOL PLANLAMASI, KULLANIM KOLAYLIĞI VE GÜVENİLİRLİK
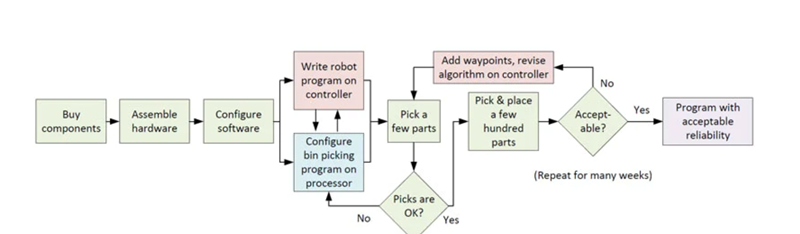
Kutudaki her bir parça için bırakma hedefine kadar benzersiz ve çarpışmasız yol planlamak, taşıma için açık ara en önemli husustur ve genellikle bir otomasyon uzmanının yaratıcılığına bırakılır. Yol planlama, sistem güvenilirliğinin ana belirleyicisidir ve iyi yapılmazsa çarpışmalara, kutuda vb. kalan veya düşen parçalara ve kaçırılan hedeflere neden olacaktır.
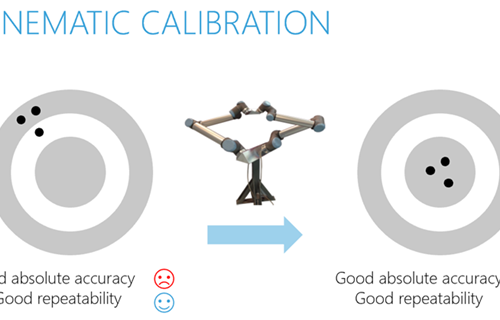
Energid’in kutudan alma ‘bin picking’ çözümü, NASA uzay aracı, petrol sondaj platformlarındaki otonom robotlar, cerrahi uygulamalar ve endüstriyel otomasyon gibi görev açısından kritik uygulamalarda kanıtlanmış akıllı yol planlama ve hareket kontrol yazılımı Actin'den yararlanıyor. Actin, sahne arkasında ve gerçek zamanlı olarak, kullanıcı tanımlı ara noktalara ve manuel ayarlamaya gerek kalmadan her parça için yol planlamasını otomatikleştirerek performansı ve güvenilirliği artırır.
KOBİ'LER İÇİN ERİŞİLEBİLİR VE UYGUN MALİYETLİ ROBOTİK PARÇA ALMA
Öyleyse, parça alma (bin picking) sorununun bir kez ve tamamen çözüldüğünü ve manuel makine desteğinin geçmişte kaldığını söyleyebilir miyiz? Tam olarak değil, çünkü her zaman otomasyon için çok karmaşık olan ve öngörülebilir gelecekte operatörleri gerektirecek uygulamalar olacaktır. Bununla birlikte, uygun maliyetli cobot'lar, 3B görüntüleme ve akıllı hareket kontrol yazılımındaki gelişmeler, günümüzün makine bakım uygulamalarının çoğunu idare edebilen ve üreticilerin sınırlı kaynaklarını daha yüksek seviyelere çıkarmasını sağlayan yeni nesil parça taşıma çözümlerini mümkün kılacak şekilde gelişiyor. Daha da önemlisi, robotik parça alma yani robotik bin picking artık KOBİ'ler için erişilebilir ve uygun maliyetli hale geldi.