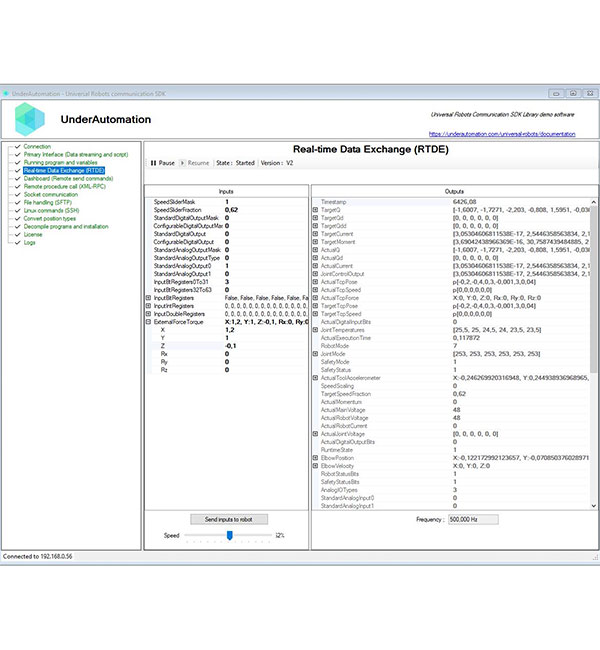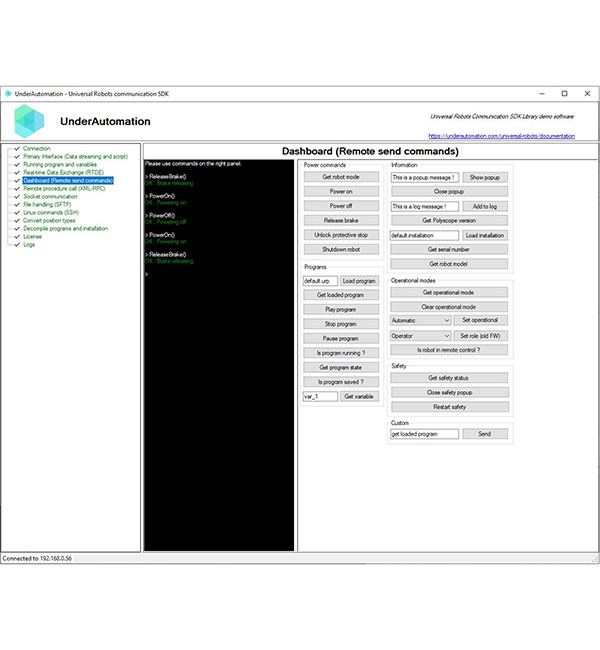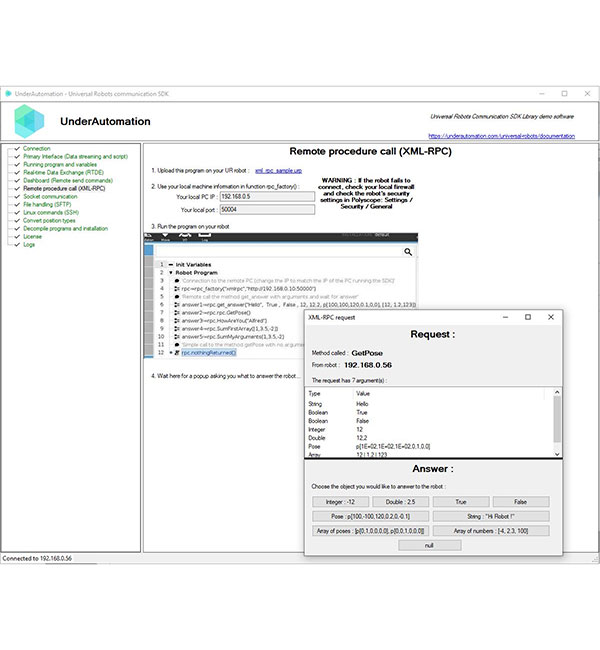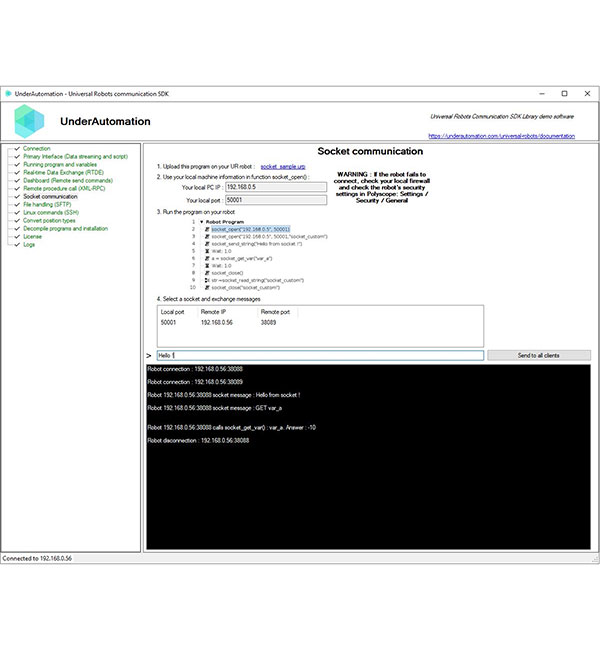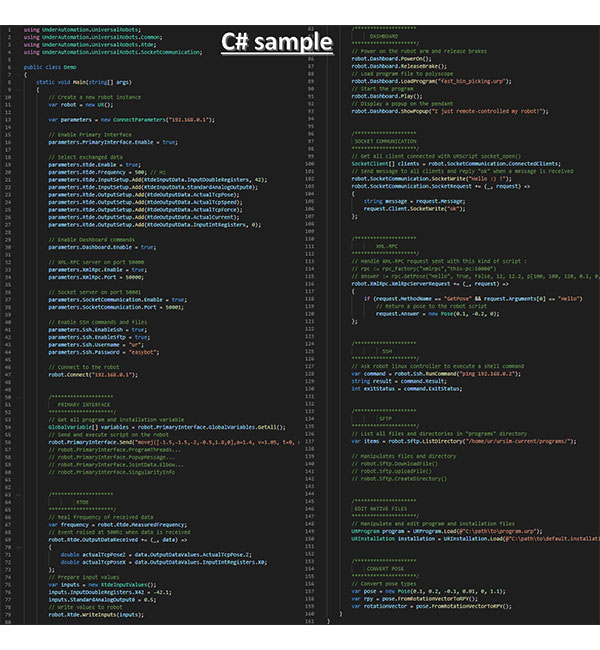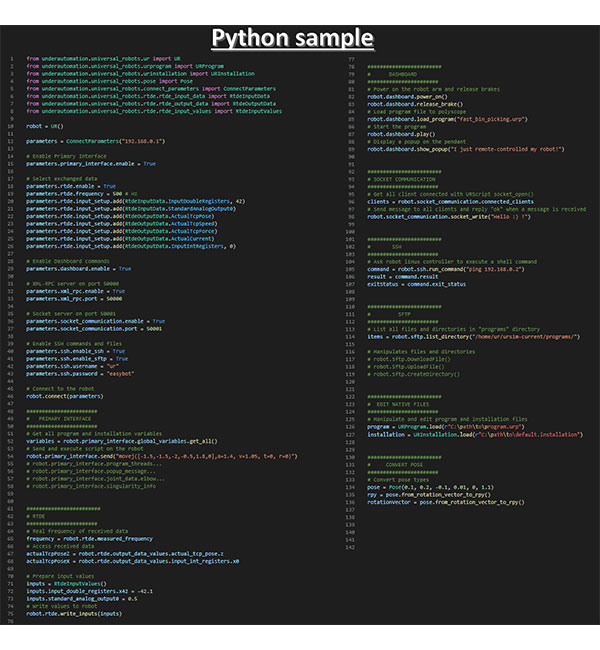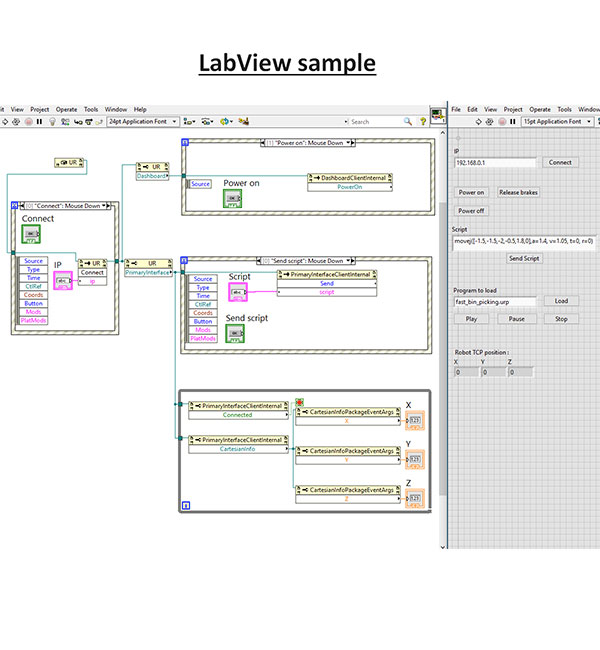
This software library allows your application to communicate with any UR cobot. Several cross-platform libraries are provided so you can develop in your preferred language: .NET (C# or VB), Python, LabView or Matlab.
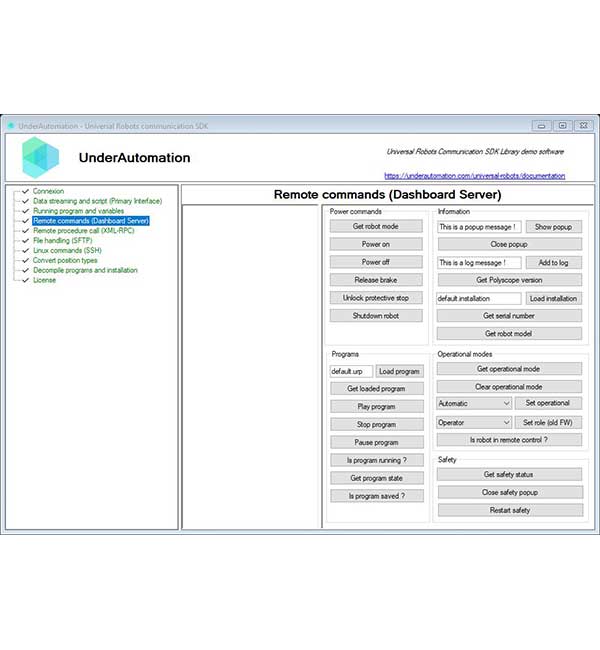
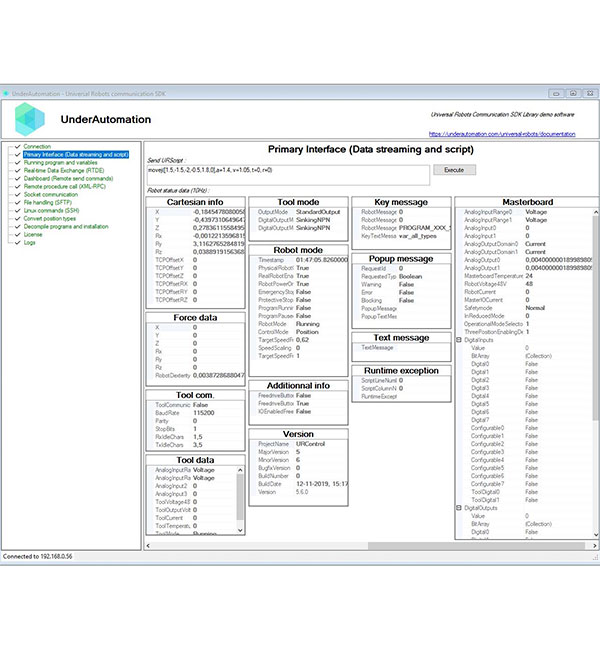
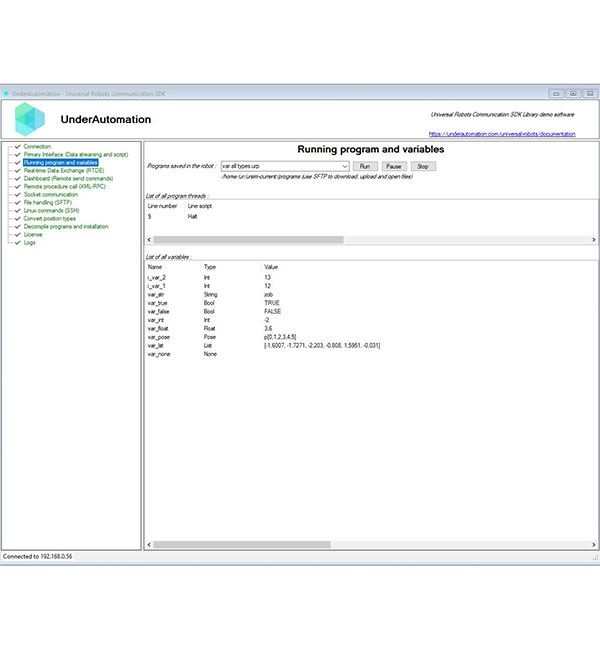
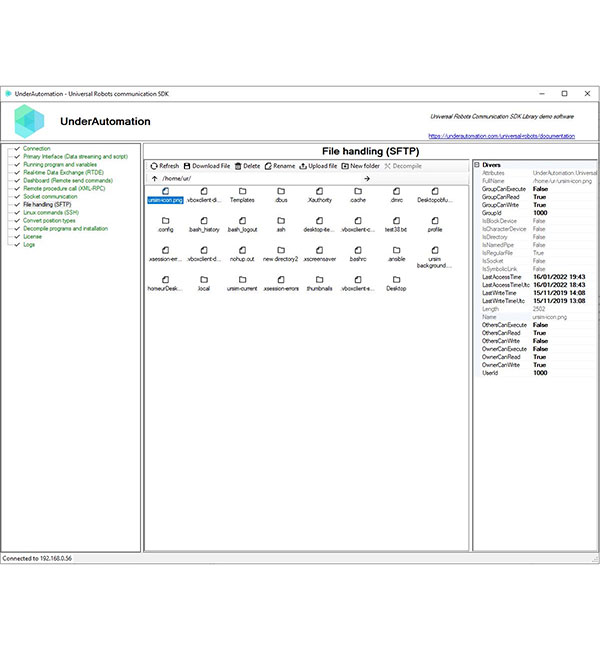
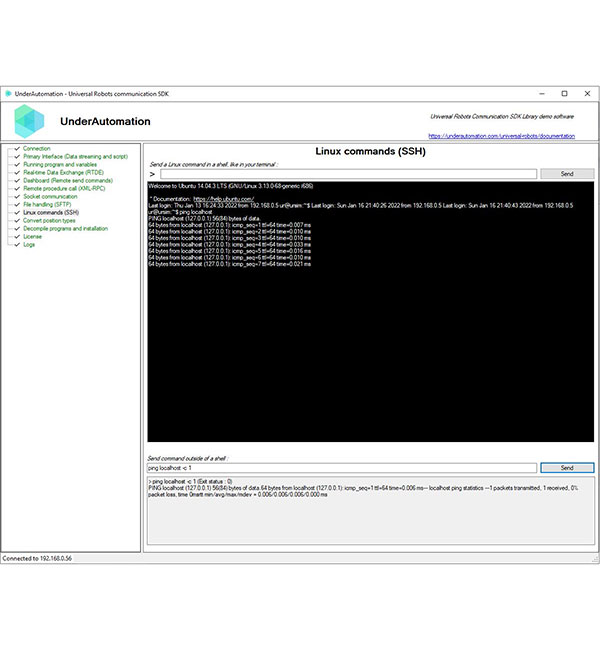
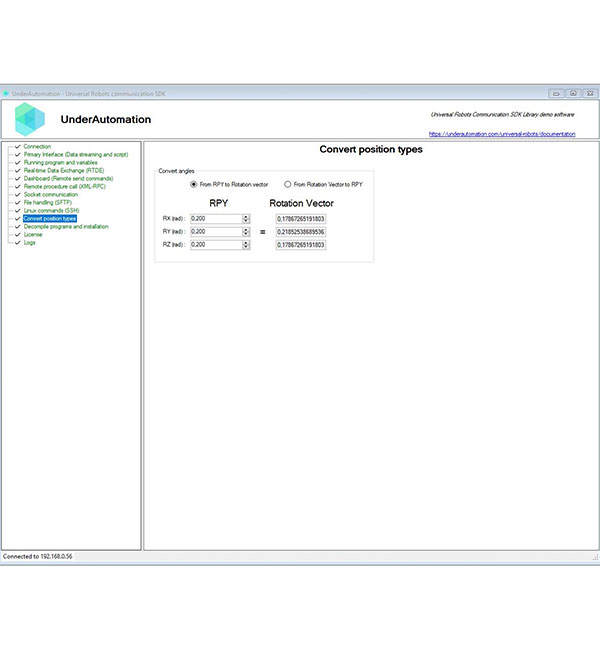
Your application will be able to connect and synchronize with the robot as well as remote control it without installing anything on the controller. Additionally, offline functions are provided to edit program files or convert position types.