跳到主内容
帐户
设置
登出
placeholder
帐户
设置
登出
筛选器:
所有文件
提交搜索
PolyScope 5 软件手册
机器人用户手册
脚本目录
为您的机器人提供服务
校准
e-Series 机器人关节更换手册
UR 系列机器人关节更换手册
e-Series 的服务
前言
Handling Electrostatic Discharge (ESD)-Sensitive Parts
Recommended Inspection Activities
Service and Replacement of Parts
使用前评估
机械臂
无电力驱动的移动
General Guidance to Separate Joint from Counterpart
Joint Connection Types
Torque Values
Power and Communication Connector Types on the Joint
Connector Location on Joints
Screw Connection
Clamp Connection
Disassembling Clamp Connection
Assembling Clamp Connection
工具法兰
关节验证
Zeroing of Joints
Dual Robot Calibration
Program Correction by Key Waypoints
Robot Cable
控制箱
Software
故障排查
Electrical Drawings
Spare Parts
Packing and Shipping of Robot/Spare Parts
UR 系列的服务
错误代码
机器人组件
机器人套件
应用指南
软件指南
筛选器:
所有文件
提交搜索
您在此处:
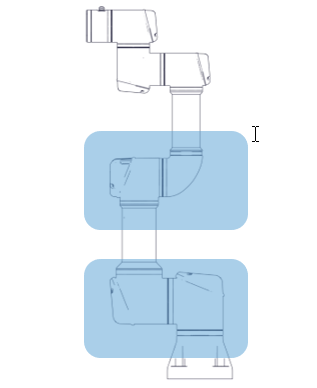
Clamp Connection
Clamp connection location
以下两节将介绍如何拆卸和组装带有夹具连接的关节。
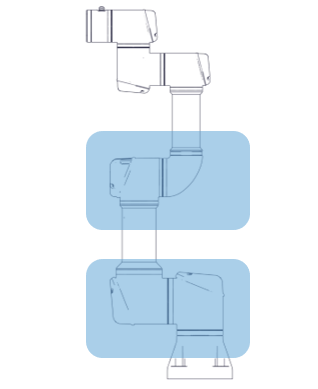
Clamp connection location
UR5e
UR10e and UR16e