Uporaba ukaza Premakni robot v položaj
Ukaz Premik robota v položaj omogoča premik robotove roke v začetni položaj po končanju programa. Robotova roka mora biti pred zagonom programa v začetnem položaju.
Če želite več informacij, si preberite razdelek Premik robota v položaj v tem uporabniškem priročniku za robota.
Če želite robotovo roko premakniti v njen začetni položaj z gumbom 3PE:
-
Ko je izvajanje programa zaključeno, pritisnite Predvajaj
-
Izberite Predvajanje od začetka.
V vmesniku PolyScope se prikaže zaslon Premik robota v položaj, ki prikazuje premikanje robotove roke.
-
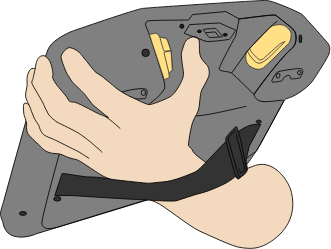
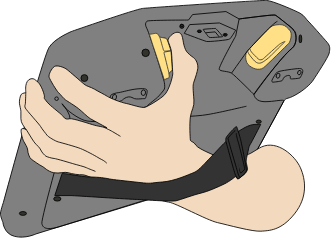
Light-press and hold the 3PE button.
-
Now, on PolyScope, press and hold Automove, for the robot arm to move to the start position.
Prikaže se zaslon Predvajaj program
-
Ohranite rahel pritisk gumba 3PE za zagon programa.
-
Sprostite gumb 3PE, da zaustavite izvajanje programa.