Planuri I/O
| Descriere |
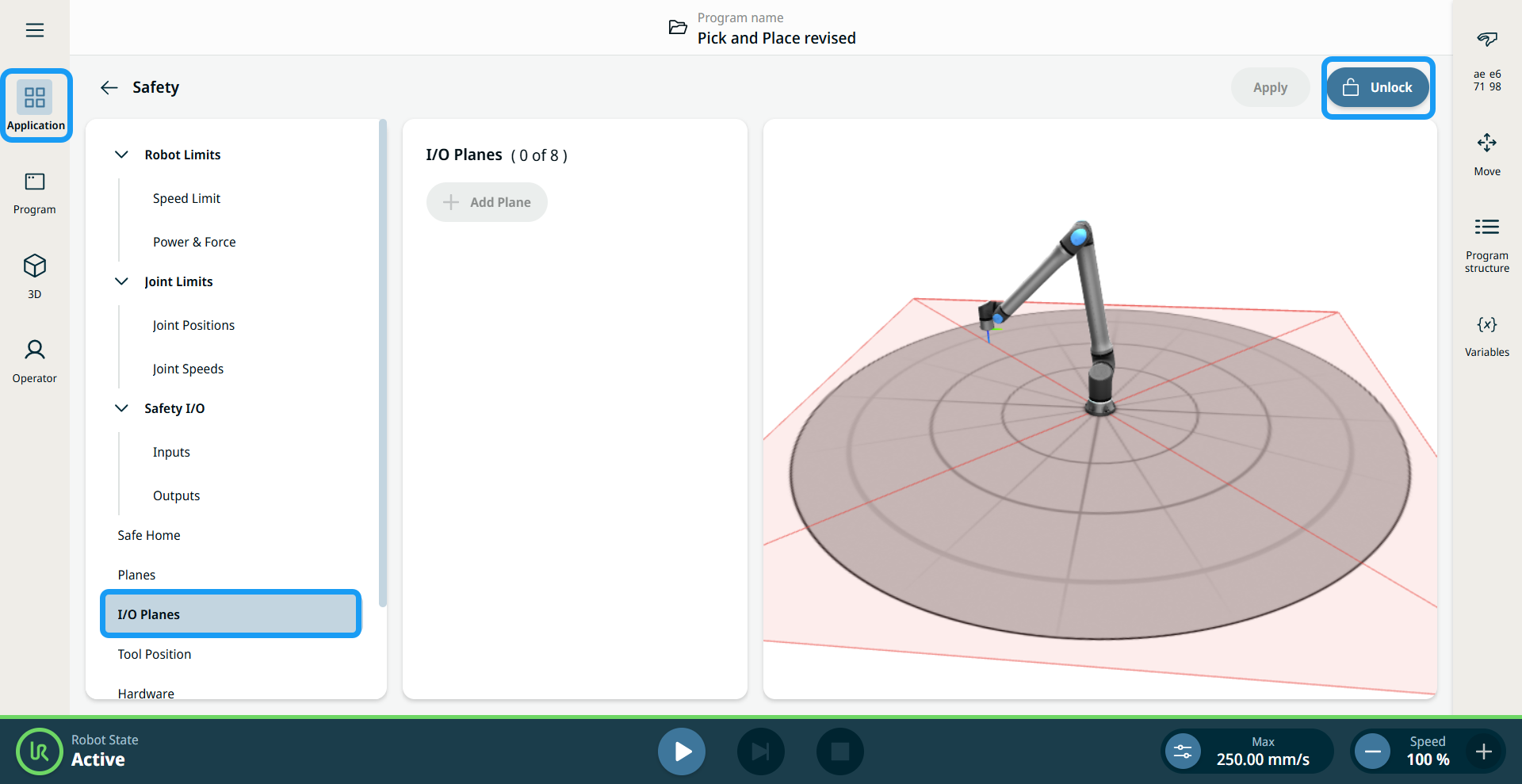
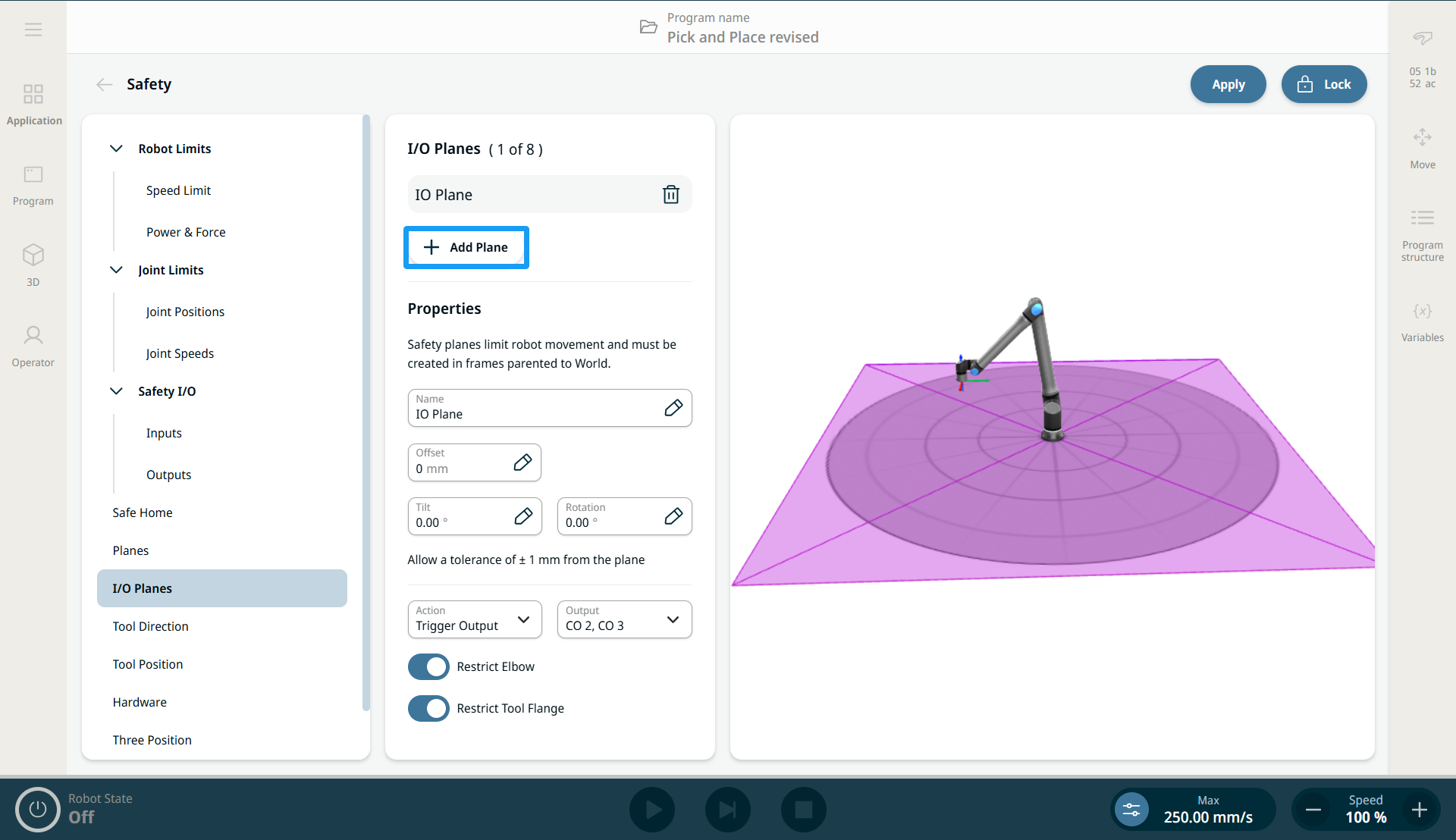
Funcția Planuri I/O oferă o utilizare mai flexibilă a planurilor de siguranță în comparație cu cea standard Planuri de siguranță standard. Acesta vă permite să activați și să dezactivați planurile de siguranță utilizând intrările terminale și/sau să generați un semnal de ieșire atunci când sferele de siguranță traversează un plan de siguranță.
|
|
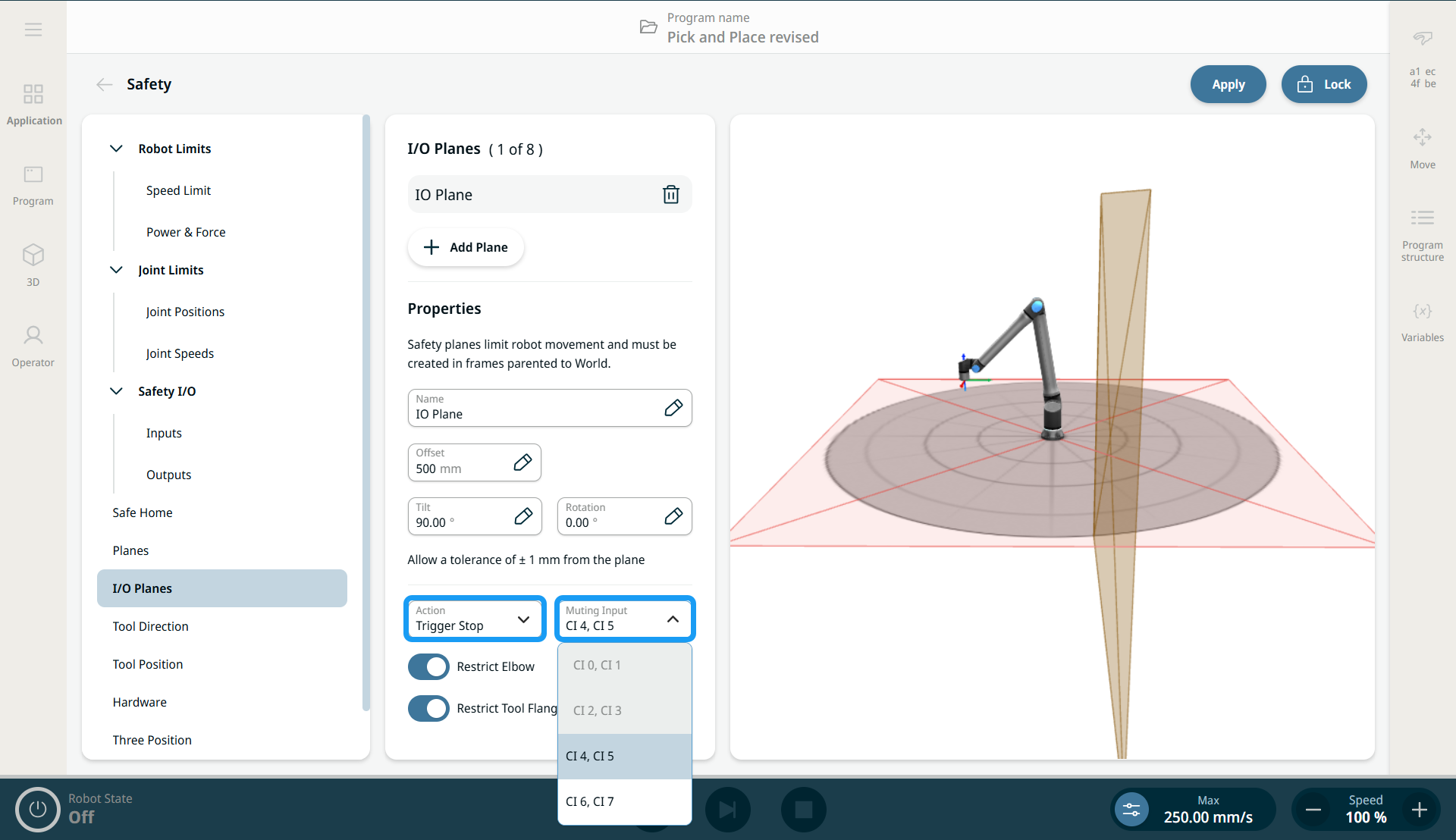
Plan de intrare/oprire |
Trigger Stop declanșează o oprire a planului I/O. Acesta poate fi dezactivat utilizând o intrare de siguranță. Dacă nu este dezactivată, mișcarea către avion determină oprirea robotului și așteptarea până când intrarea de siguranță dezactivează avionul. Atunci când planul este inactiv, robotul se poate deplasa liber. Atunci când planul este activ și robotul nu a traversat planul, robotul se va opri înainte de a traversa planul. Dacă planul este activat, în timp ce robotul se deplasează pe marginea planului, robotul poate ajunge să traverseze planul și, în cel mai rău caz, se va opri în conformitate cu limitele de distanță și timp de oprire configurate. Atunci când planul este activat și robotul a traversat planul, robotul se va opri în funcție de limitele configurate pentru distanța de oprire și timpul de oprire.
|
|
|
|
|
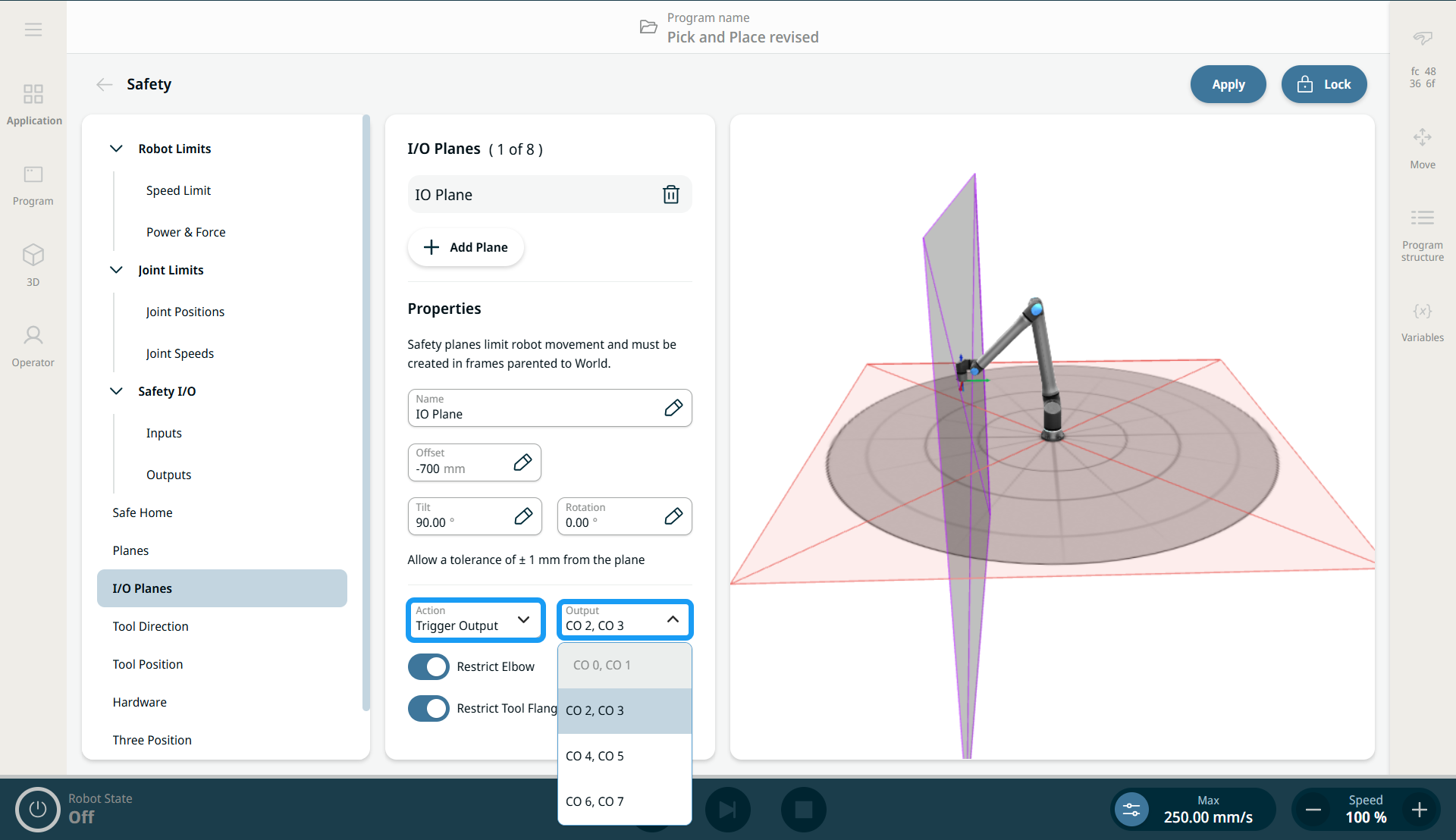
Planul de ieșire |
Trigger Output generează o ieșire de siguranță în funcție de faptul dacă una sau mai multe sfere de siguranță au traversat planul. Atunci când una sau mai multe sfere de siguranță au traversat un plan definit ca ieșire de declanșare, este activată ieșirea de siguranță corespunzătoare planului respectiv. "Activat" înseamnă că ieșirile de siguranță sunt setate electric "Low". Atunci când oricare dintre sferele de siguranță a traversat un plan definit ca ieșire de declanșare, se activează ieșirea de siguranță corespunzătoare planului respectiv.
|