Siguranță I/O
| Descriere |
I/O sunt împărțite între inputuri și outputuri, ce sunt împerecheate astfel încât fiecare funcție asigură o capabilitate PLd de Categoria 3.
La pornirea programelor de la o intrare I/O sau fieldbus, robotul poate începe mișcarea din poziția în care se află, nu va fi necesară nicio deplasare manuală în primul punct de trecere cu ajutorul PolyScope.
|
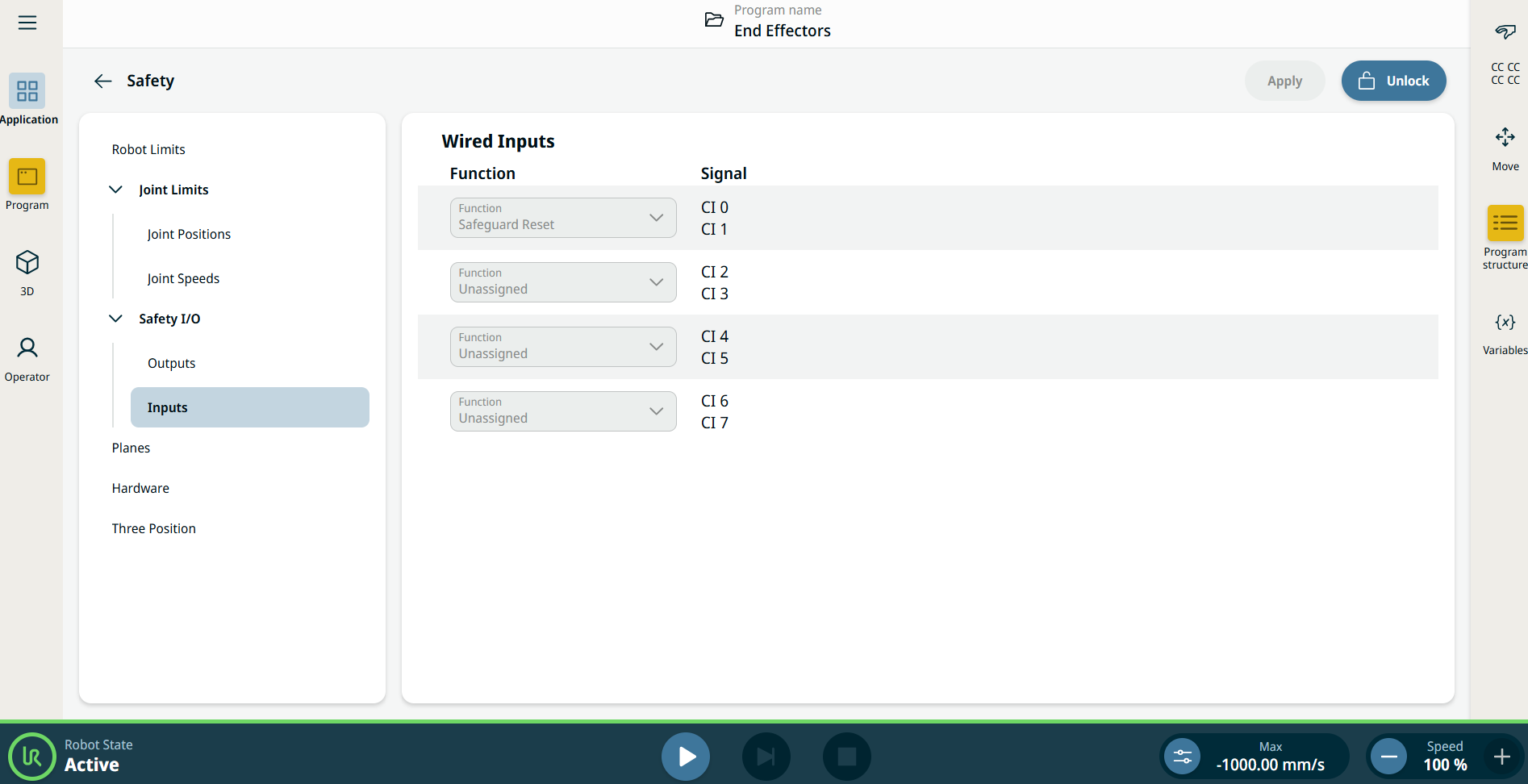
| Inputuri casetă de comandă |
Inputurile sunt descrise în tabelele de mai jos:
Când resetarea de siguranță implicită este dezactivată, o resetare automată are loc atunci când protecția nu mai declanșează o oprire. Acest lucru se poate întâmpla dacă o persoană trece prin câmpul de protecție. Dacă o persoană nu este detectată de dispozitivul de protecție și persoana este expusă pericolelor, resetarea automată este interzisă de standarde.
Când Oprire de siguranță în modul Automat este activată, oprirea de siguranță nu este declanșată în modul Manual.
|
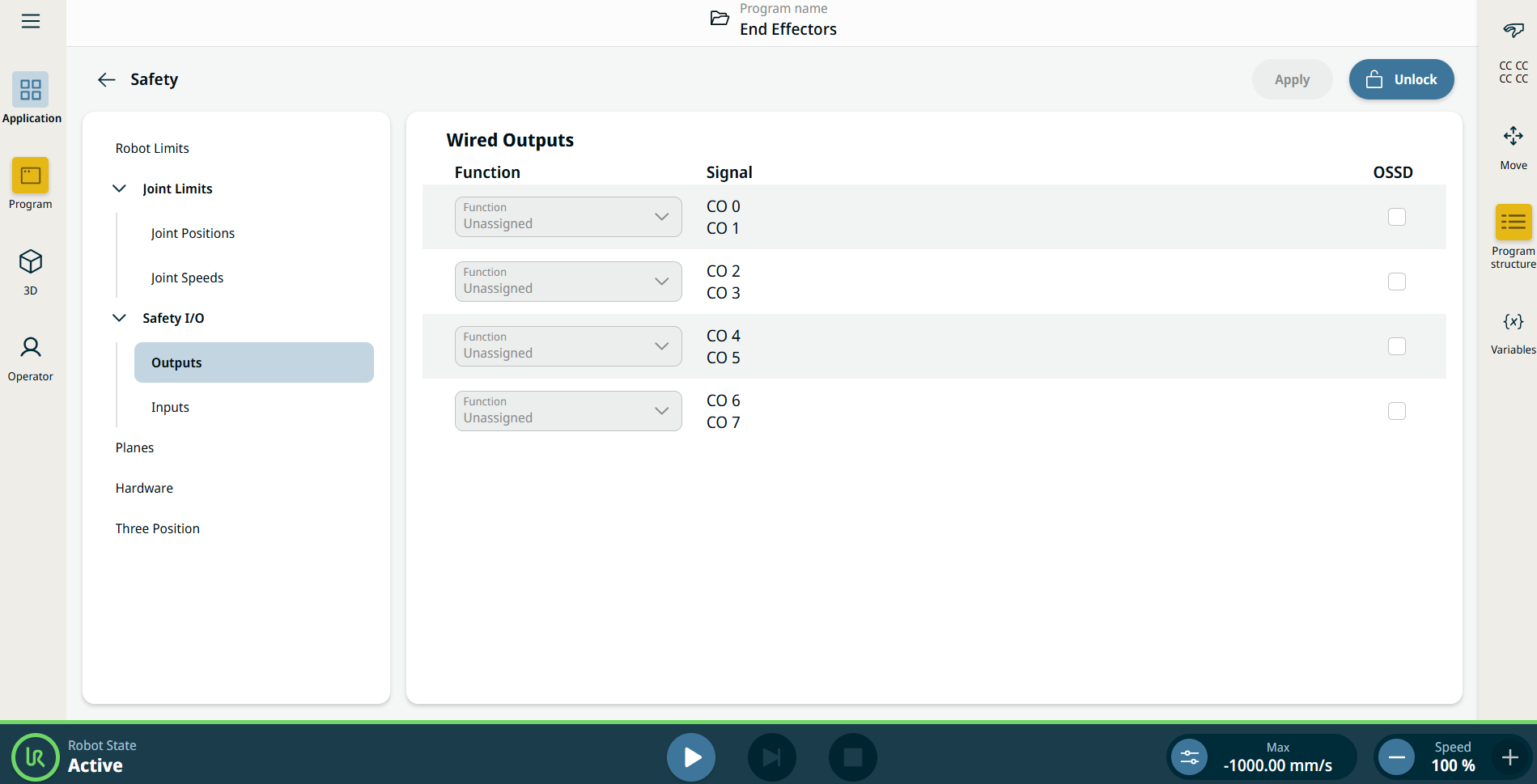
| Outputuri casetă de comandă |
Toate outputurile de siguranță trec în low în cazul unei încălcări sau defecțiuni a sistemului de siguranță. Aceasta înseamnă că outputul Oprire sistem inițiază o oprire chiar și atunci când nu este declanșată o oprire de urgență E-stop. Puteți aplica următoarele funcții de Siguranță pentru semnale de output. Toate semnalele revin la low când starea care a declanșat semnalul high s-a încheiat:
Un utilaj extern ce primește starea Oprire de Urgență de la robot prin outputul de Oprire de Urgență Sistem trebuie să fie conform cu ISO 13850. Acest lucru este necesar în special în configurațiile unde inputul de Oprire de Urgență Robot este conectat la un dispozitiv extern de Oprire de Urgență. În astfel de cazuri, outputul de Oprire sistem devine high când se eliberează dispozitivul extern de Oprire de urgență. Aceasta înseamnă că starea de oprire de urgență la utilajul extern va fi resetată fără a fi necesară nicio acțiune manuală de la operatorul robotului. De aceea, pentru a respecta standardele de siguranță, utilajul extern trebuie să impună o comandă manuală pentru a-și relua funcționarea.
|