Locuință sigură
| Descriere |
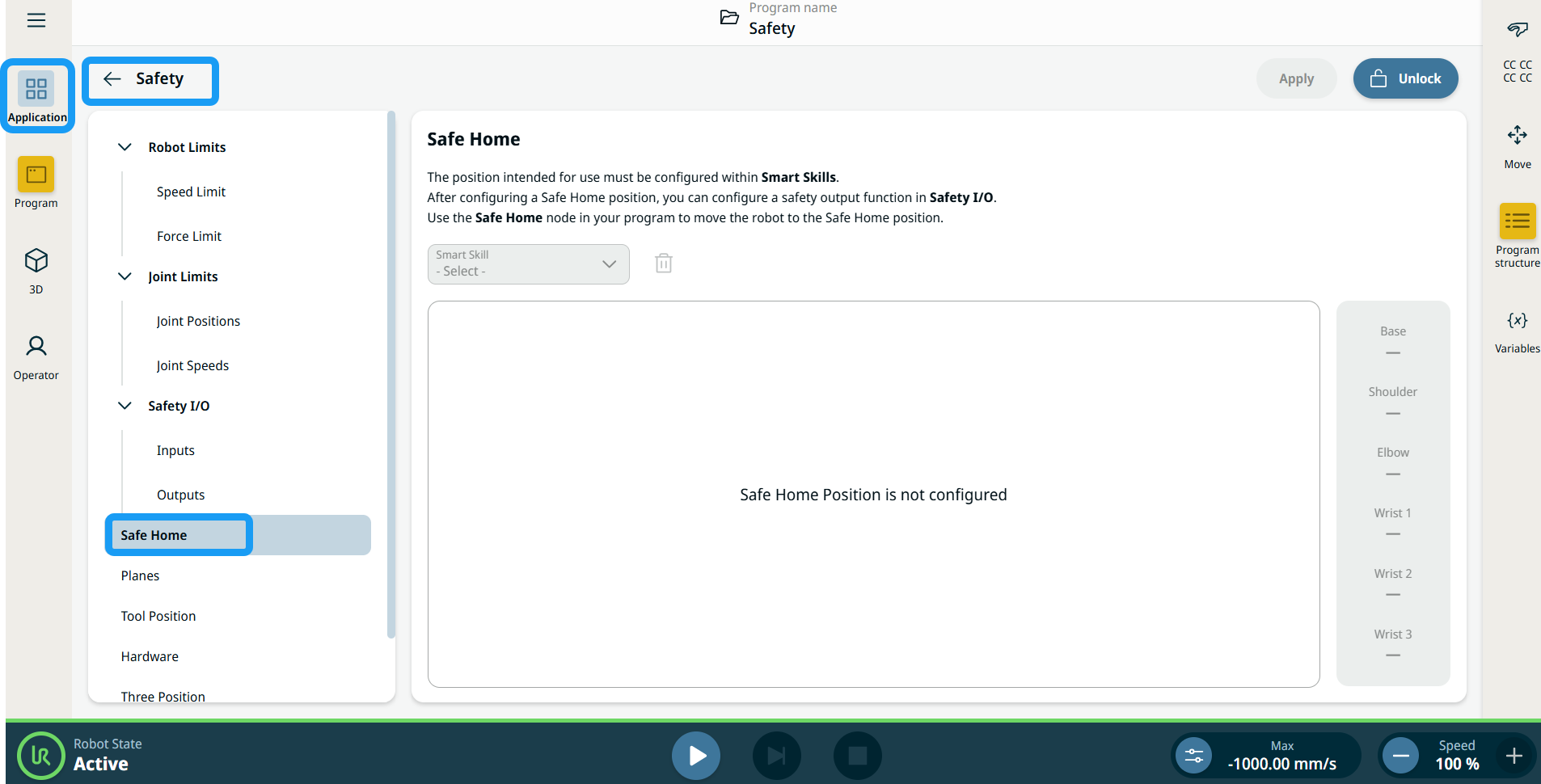
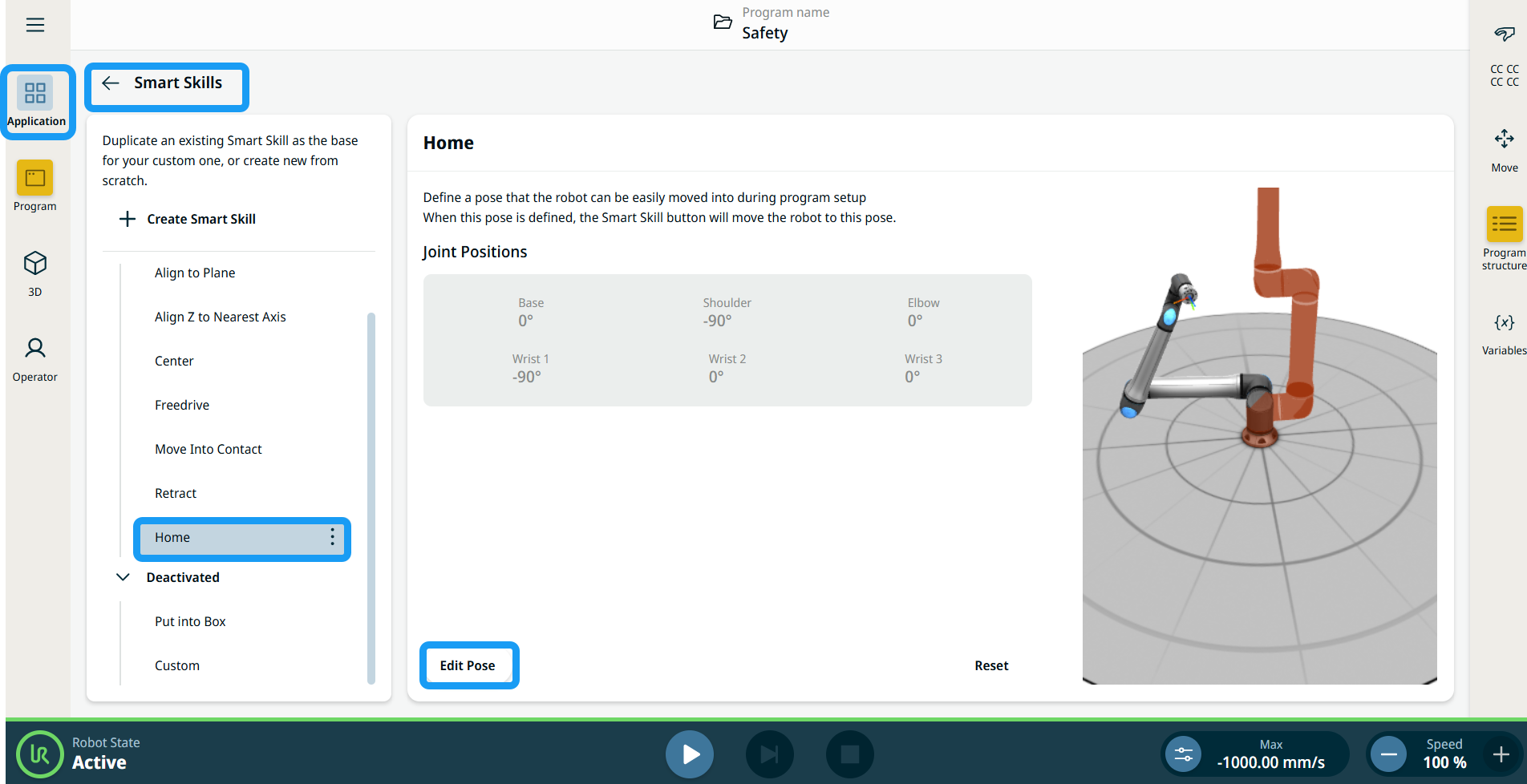
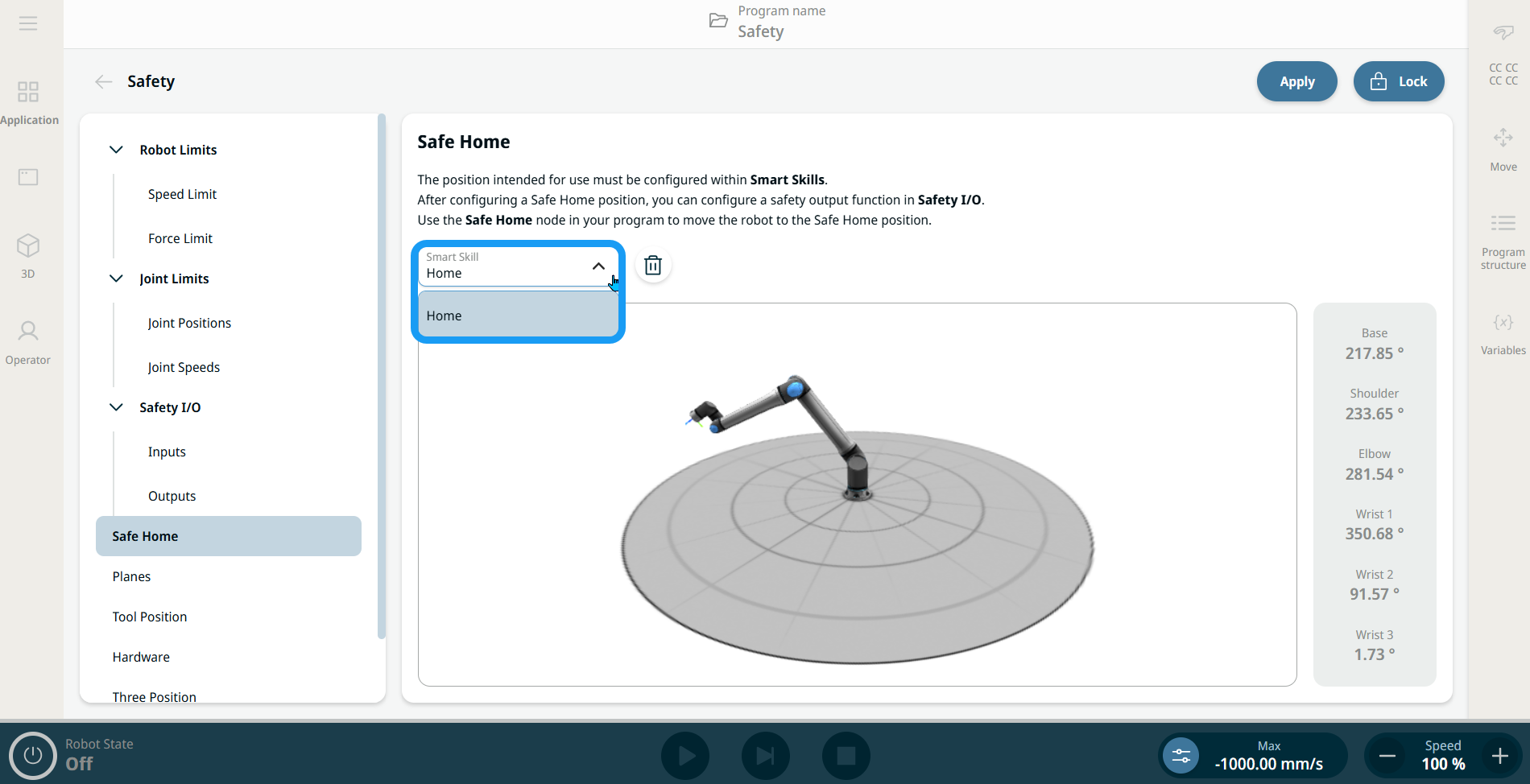
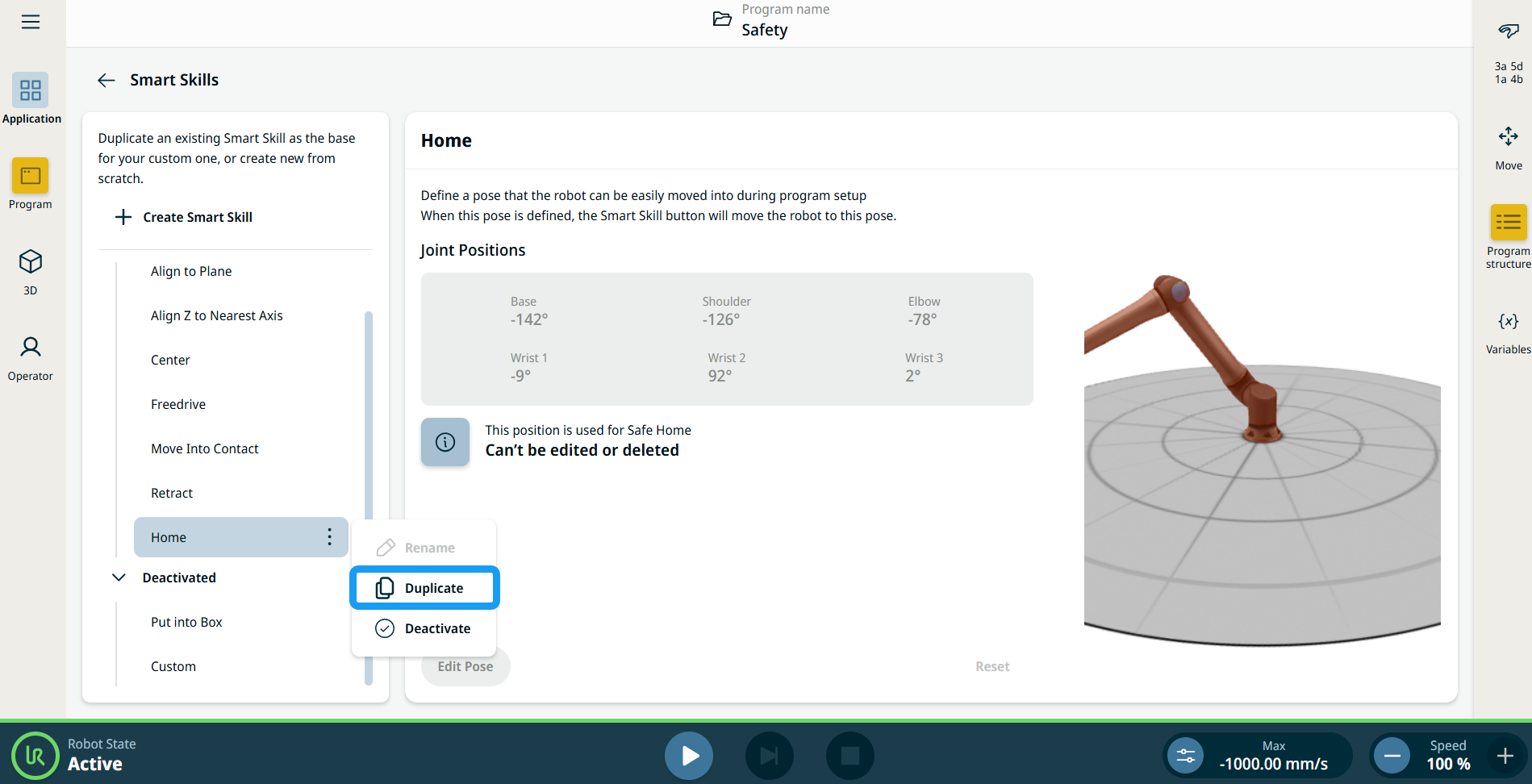
Acasă în siguranță este o caracteristică PolyScope X care permite utilizatorilor să definească un output legat de siguranță care se activează atunci când robotul ajunge în poziția de acasă configurată. Utilizatorul alege Acasă din meniul derulant al pozițiilor disponibile pentru abilități inteligente, care pot fi atribuite ca referință pentru poziția Acasă în siguranță.
|
|
Accesarea opțiunii Acasă în siguranță |
|
|
|
|
|
|
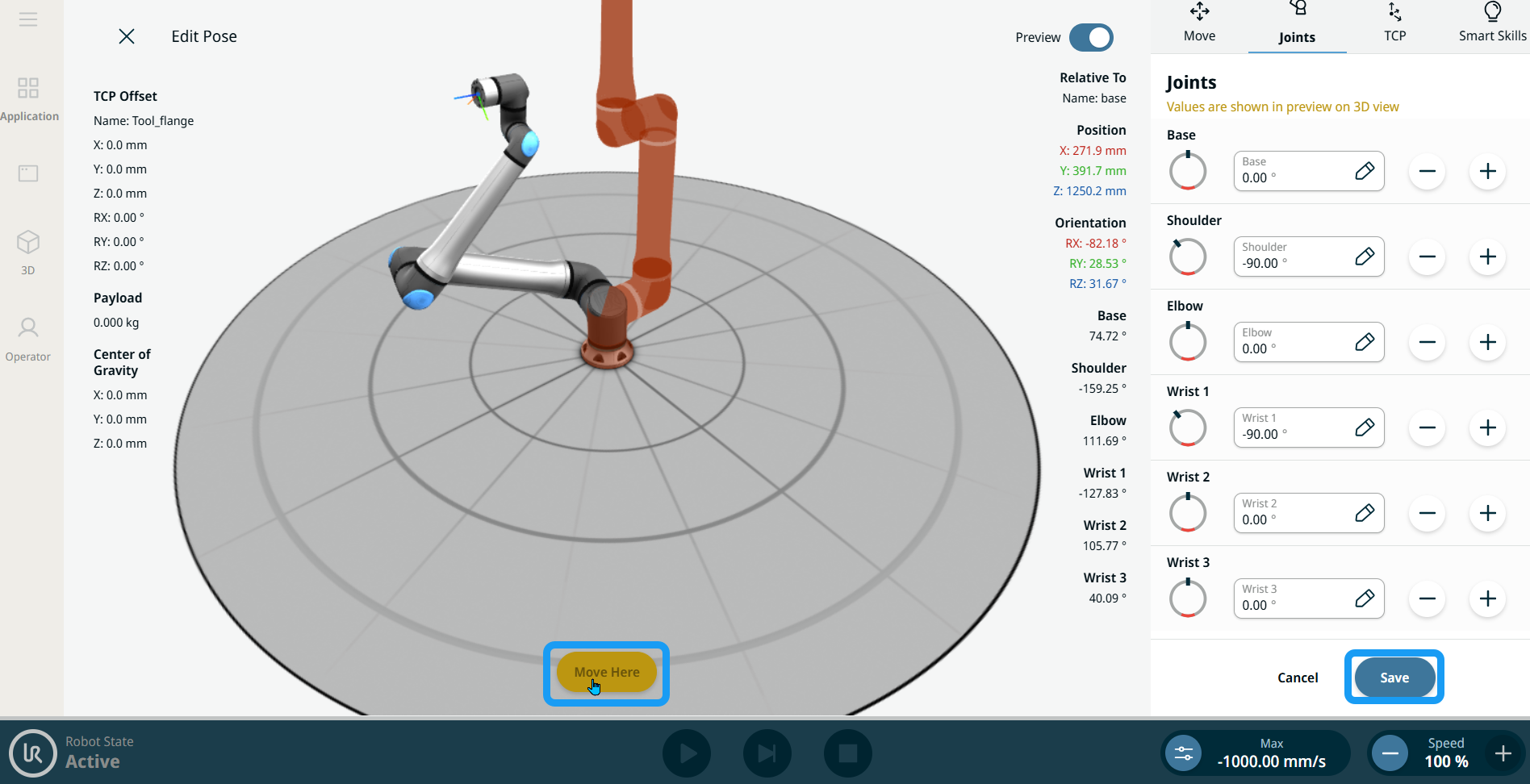
Dacă funcția Position Smart Skill este selectată ca referință de poziție pentru Safe Home:
|
|
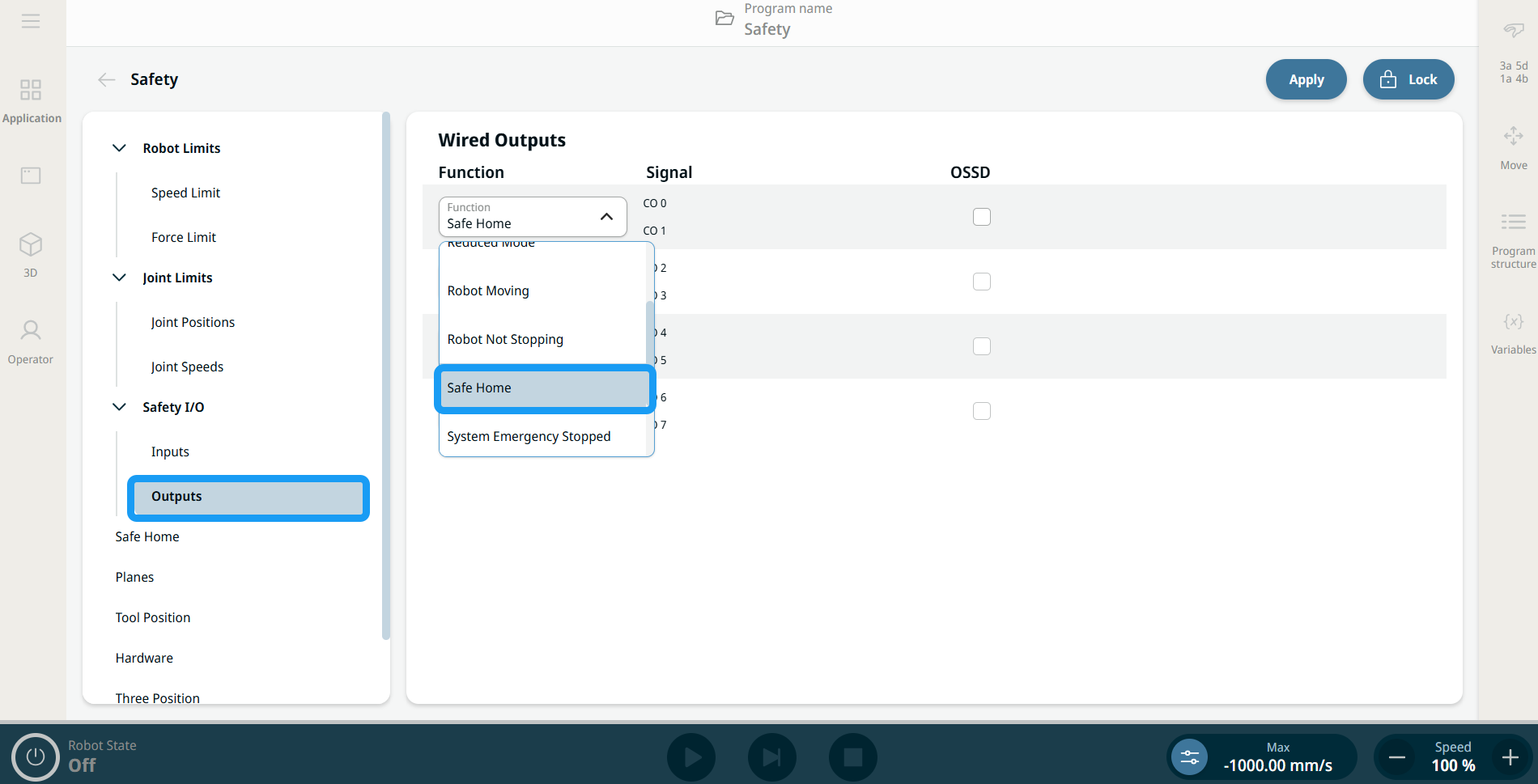
Funcția Acasă în siguranță în outputuri |
În cazul în care poziția Acasă este atribuită unei poziții de abilitate inteligentă în fila Siguranță, meniul derulant pentru funcția de output de siguranță conține Acasă în siguranță ca atribuire de funcție nouă. Alegeți o poziție de Acasă în siguranță în câmpurile Funcție din Outputuri de la I/O de siguranță.
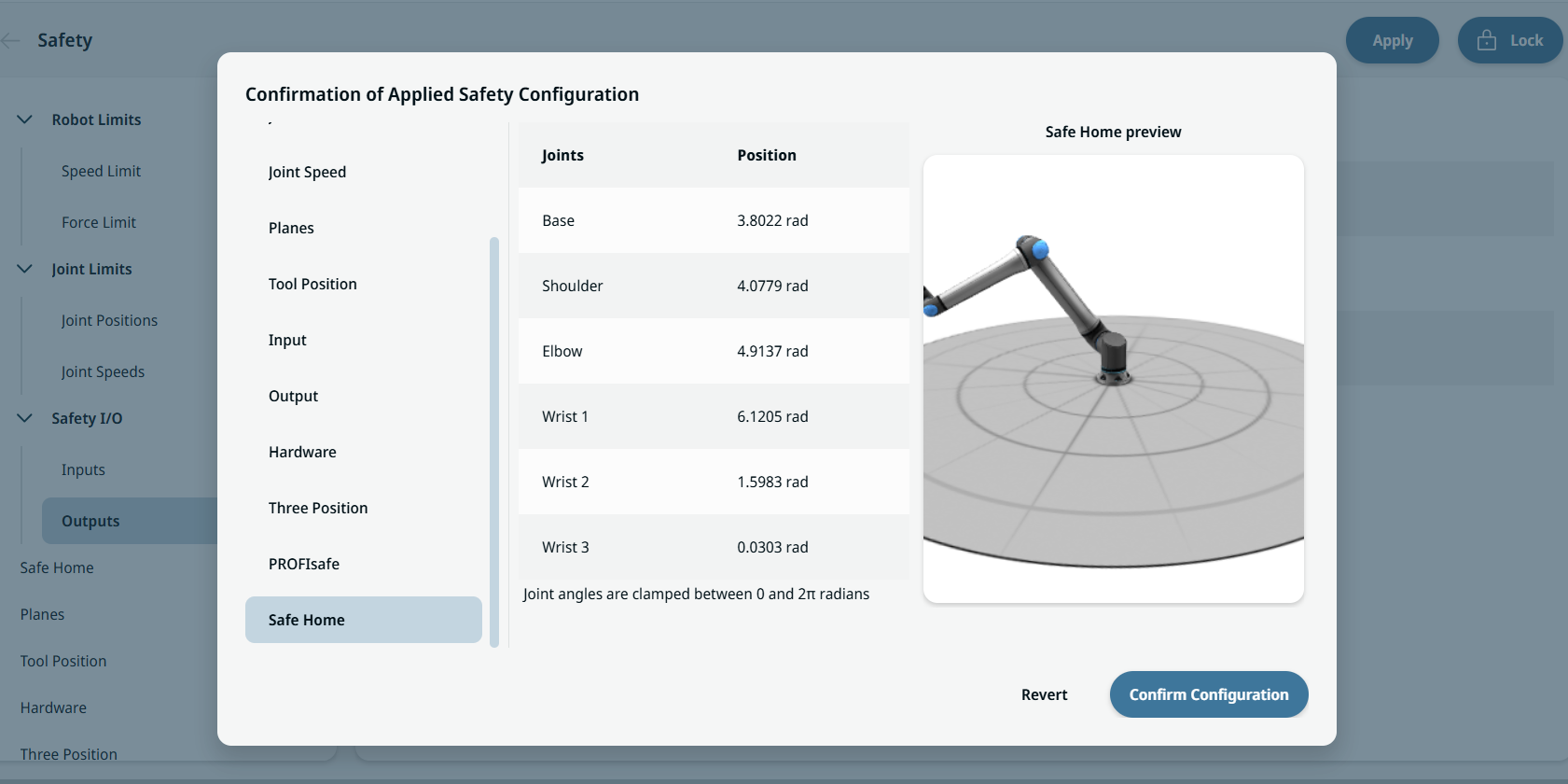
Poziția Acasă în siguranță poate fi văzută în tabelul de atribuire a funcției din conținutul dialogului Confirmare configurație de siguranță aplicată.
|
|
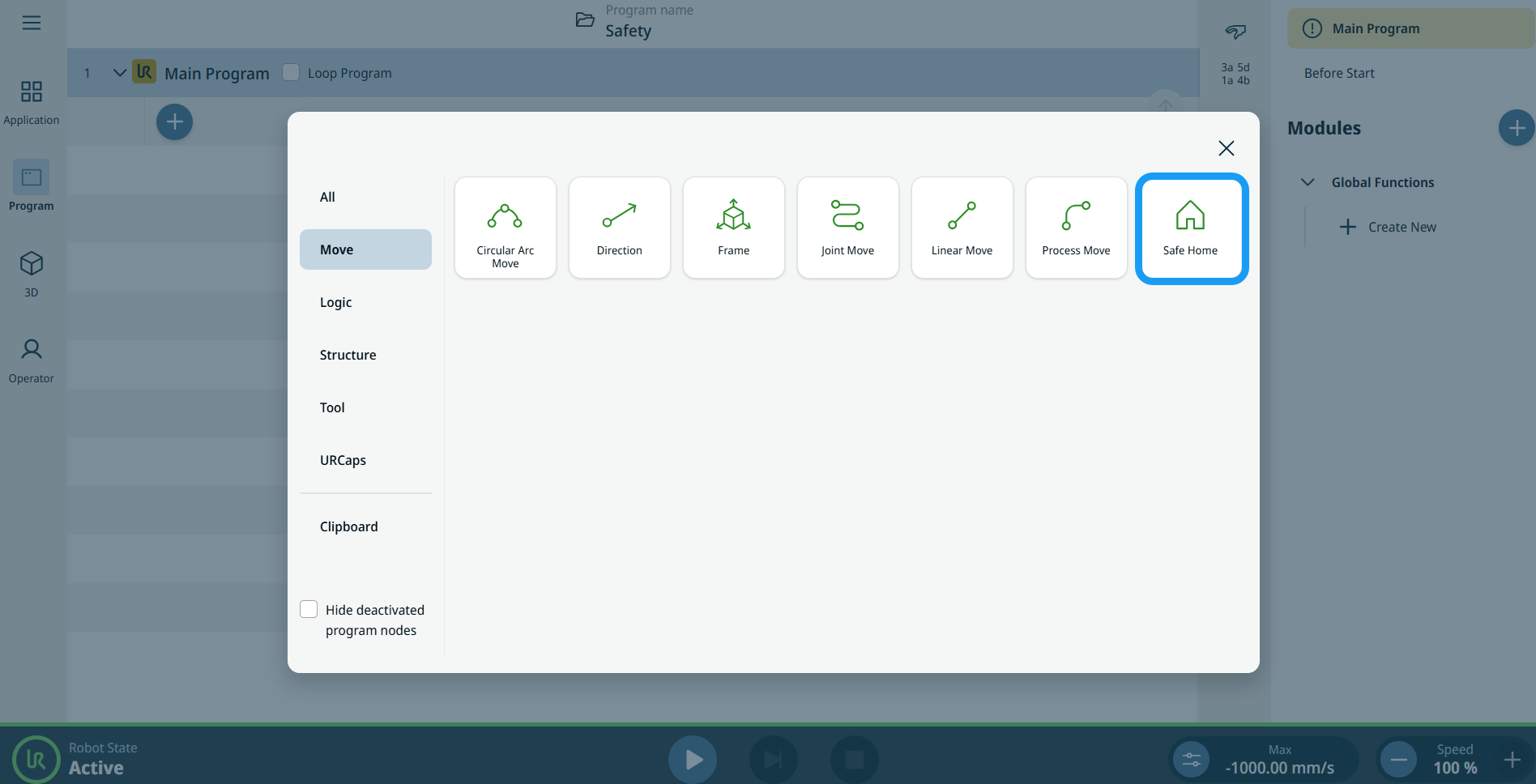
Acasă în siguranță ca nod de program |
Nodul de program Acasă în siguranță este situat sub categoria Noduri mișcare în cadrul secțiunii Noduri de comandă. Acest nod este folosit pentru a comanda robotul să se miște în poziția sa Acasă în siguranță predefinită, așa cum a fost configurată în setările de siguranță ale aplicației pentru această poziție.
Adăugarea nodului fără o poziție Acasă în siguranță configurată în fila Siguranță va marca nodul cu galben.

Nodul de comandă Acasă în siguranță are opțiuni de profiluri de mișcare și alte setări avansate atunci când pictograma elipsă
|
 este apăsată.
este apăsată.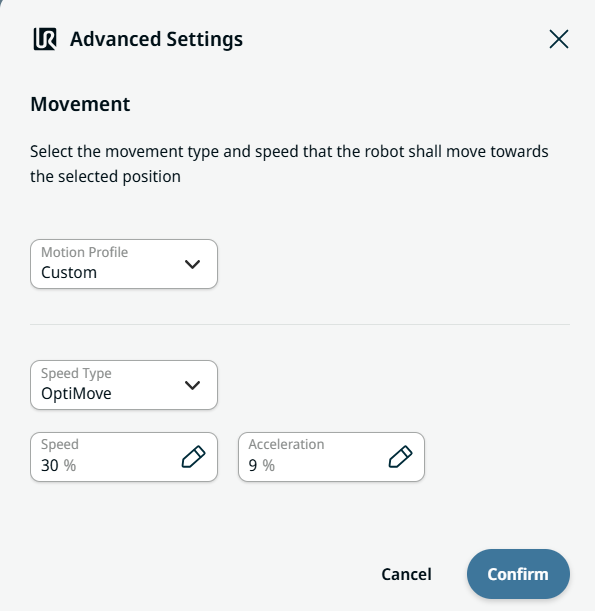
| Setări avansate |
Utilizatorii pot crea profiluri de mișcare în Setări avansate folosind cele două file și două câmpuri:
Profilul de mișcare este o caracteristică care permite utilizatorilor să seteze profiluri de mișcare predefinite în nodurile de mișcare: Mișcare articulație, Mișcare liniară, Mișcare circulară, Proces mișcare și Direcție. Profilul de mișcare personalizat permite utilizatorilor să definească datele de mișcare în nodul de mișcare. În câmpul Tip viteză, opțiunea implicită este OptiMove. Alegeți mișcarea „ ” sau „ ” dacă doriți să introduceți viteza și accelerația în grade pe secundă sau milimetri pe secundă. Setările OptiMove sunt specificate în procente pentru a simplifica utilizarea și configurarea. Utilizatorii pot configura procentajul de viteză preferat în fila Viteză, care stabilește viteza de deplasare vizată ca procent din viteza maximă a robotului. Utilizatorii pot configura procentajul accelerației preferate în fila Accelerație, care stabilește limitele cuplului țintă în timpul accelerării și decelerării ca procent din puterea maximă a robotului.
|