Utilização da funcionalidade Mover Robô para Posição
A função Mover Robô para Posição permite ao braço do robô mover-se para a posição inicial, após concluir um programa. O braço do robô deve estar na posição inicial antes de poder executar o programa.
Para mais informações, consulte a secção Mover Robô para a Posição no Manual do Utilizador do Robô.
Para utilizar o botão 3PE para colocar o braço do robô em posição:
-
Quando o seu programa estiver completo, prima Reproduzir
-
Selecione Reproduzir do início.
No PolyScope, aparece o ecrã Move Robot into Position a mostrar o movimento do braço do robô.
-
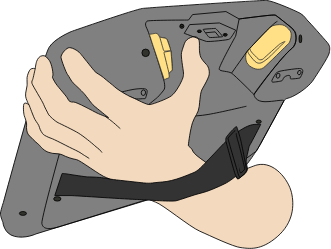
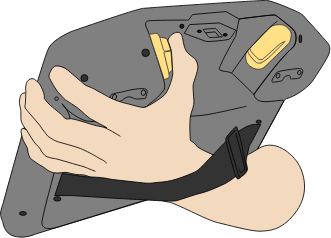
Light-press and hold the 3PE button.
-
Now, on PolyScope, press and hold Automove, for the robot arm to move to the start position.
O ecrã Carregar Programa aparece.
-
Mantenha uma pressão ligeira no botão 3PE para executar o seu programa.
-
Solte o botão 3PE para parar o programa.