Używanie funkcji Przesuń robota do pozycji
Funkcja Przesuń robota do pozycji umożliwia przesunięcie ramienia robota do wymaganej pozycji początkowej po ukończeniu programu. Przed uruchomieniem programu ramię robota musi znajdować się w pozycji początkowej.
Więcej informacji zawiera rozdział dotyczący funkcji Przesuń robota do pozycji w podręczniku użytkownika robota.
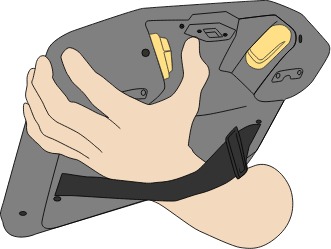
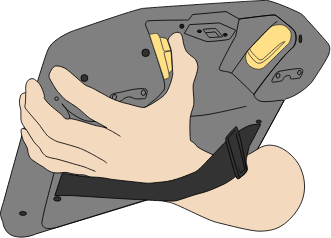
Aby użyć przycisku 3PE w celu przesunięcia ramienia robota do pozycji:
-
Gdy program zostanie ukończony, naciśnij przycisk Odtwarzaj
-
Wybierz opcję Odtwórz od początku.
W interfejsie PolyScope wyświetlony zostanie ekran Przesuń robota do pozycji, przedstawiający ruch ramienia robota.
-
Light-press and hold the 3PE button.
-
Now, on PolyScope, press and hold Automove, for the robot arm to move to the start position.
Wyświetlony zostanie ekran Odtwórz program.
-
Utrzymuj lekkie naciśnięcie przycisku 3PE, aby uruchomić program.
-
Zwolnić przycisk 3PE, aby zatrzymać program.