I/U-planer
| Beskrivelse |
Funksjonen I/O Planes gir mer fleksibel bruk av sikkerhetsplaner sammenlignet med standard Safety Planes -funksjonalitet. Den lar deg aktivere og deaktivere sikkerhetsplan ved hjelp av terminalinnganger, og/eller generere et utgangssignal når sikkerhetskulene krysser et sikkerhetsplan.
|
|
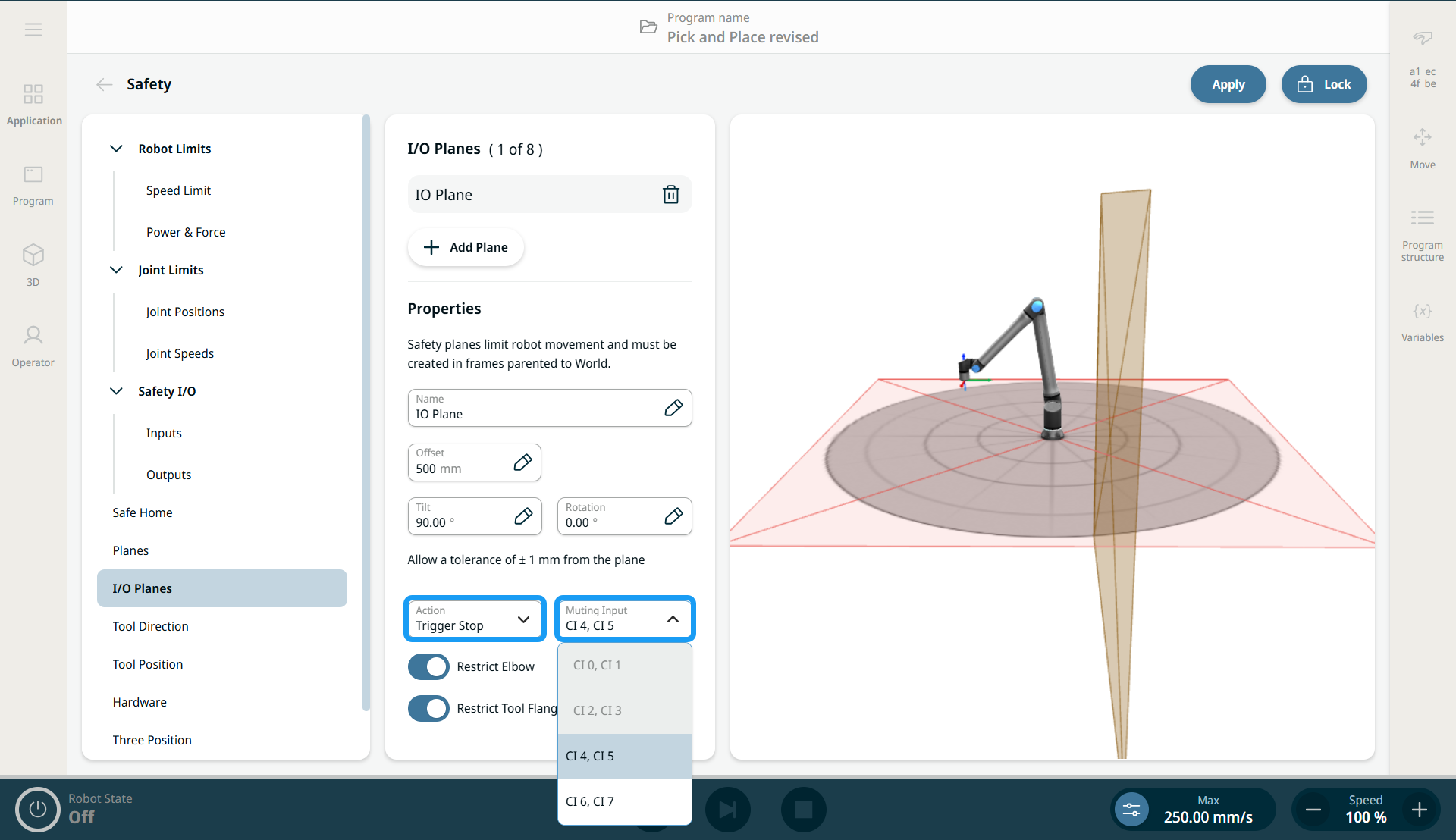
Inngangs-/stoppplan |
Trigger Stop utløser et stopp i I/O-planet. Den kan slås av ved hjelp av en sikkerhetsinngang. Med mindre den er dempet, fører bevegelse mot flyet til at roboten stopper og venter til sikkerhetsinngangen demper flyet. Når planet er inaktivt, kan roboten bevege seg fritt. Når planet er aktivt og roboten ikke har krysset planet, vil roboten stoppe før den krysser planet. Hvis planet aktiveres mens roboten beveger seg på kanten av planet, kan roboten ende opp med å krysse planet og vil i verste fall stoppe i henhold til de konfigurerte avstands- og stopptidsgrensene. Når planet er aktivert og roboten har krysset planet, stopper roboten i henhold til de konfigurerte stoppavstands- og stopptidsgrensene.
|
|
|
|
|
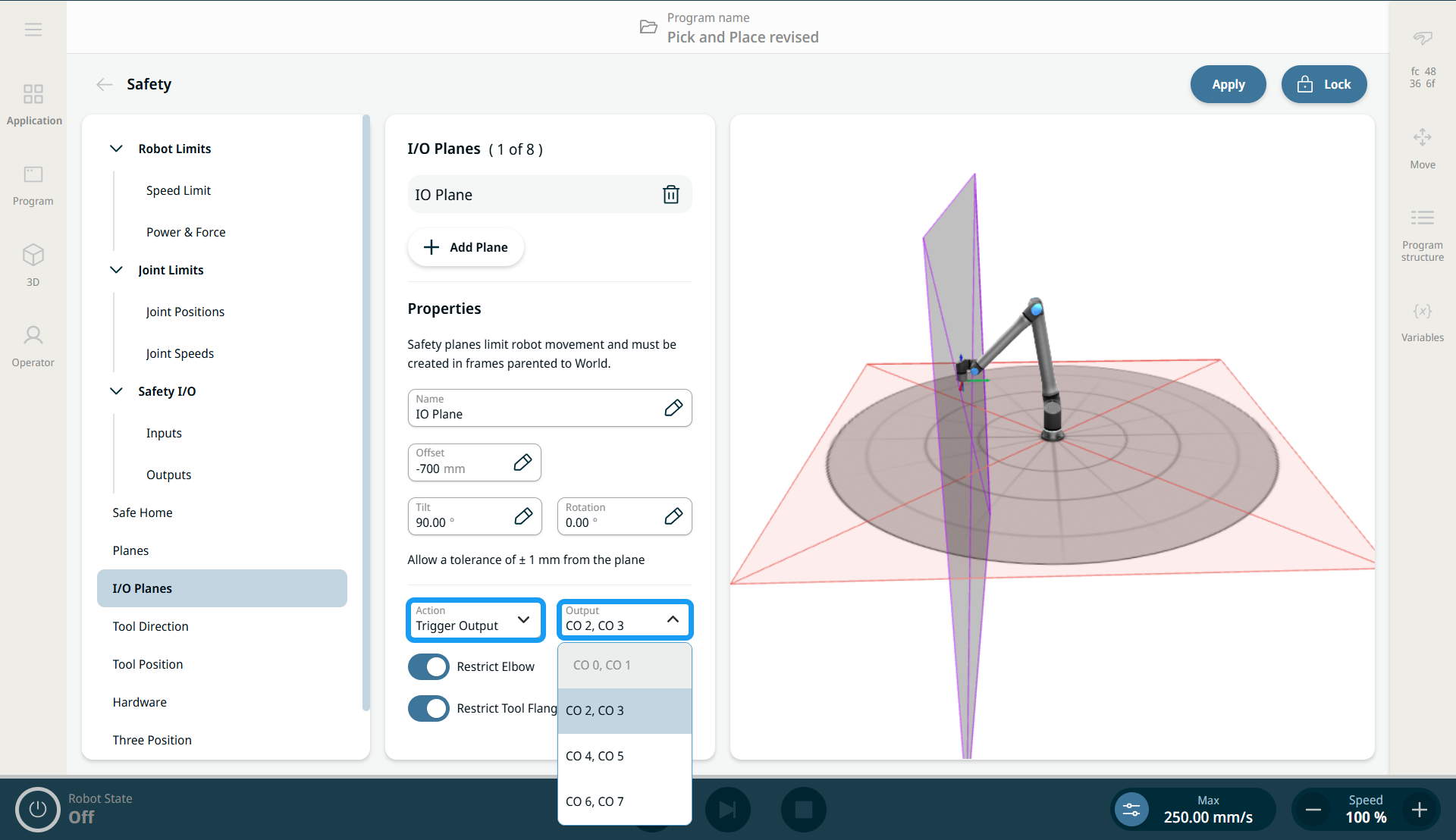
Utgangsplan |
Triggerutgang genererer en sikkerhetsutgang basert på om en eller flere av sikkerhetskulene har krysset planet. Når en eller flere av sikkerhetskulene har krysset et plan som er definert som triggerutgang, aktiveres sikkerhetsutgangen som tilsvarer det aktuelle planet. "Aktivert" betyr at sikkerhetsutgangene er elektrisk innstilt på "Lav". Når en av sikkerhetskulene har krysset et plan som er definert som triggerutgang, aktiveres sikkerhetsutgangen som tilsvarer det aktuelle planet.
|