Sikkerhets-I/O
| Beskrivelse |
I/U-ene er delt mellom innganger og utganger, og er synkroniserte slik at hver funksjon tilbyr en kategori 3 og PLd-kapasitet.
Når du starter programmer fra en I/U eller feltbuss-inngang, kan roboten starte bevegelse fra posisjonen den har. Det kreves ingen manuell bevegelse mot det første vendepunktet via PolyScope.
|
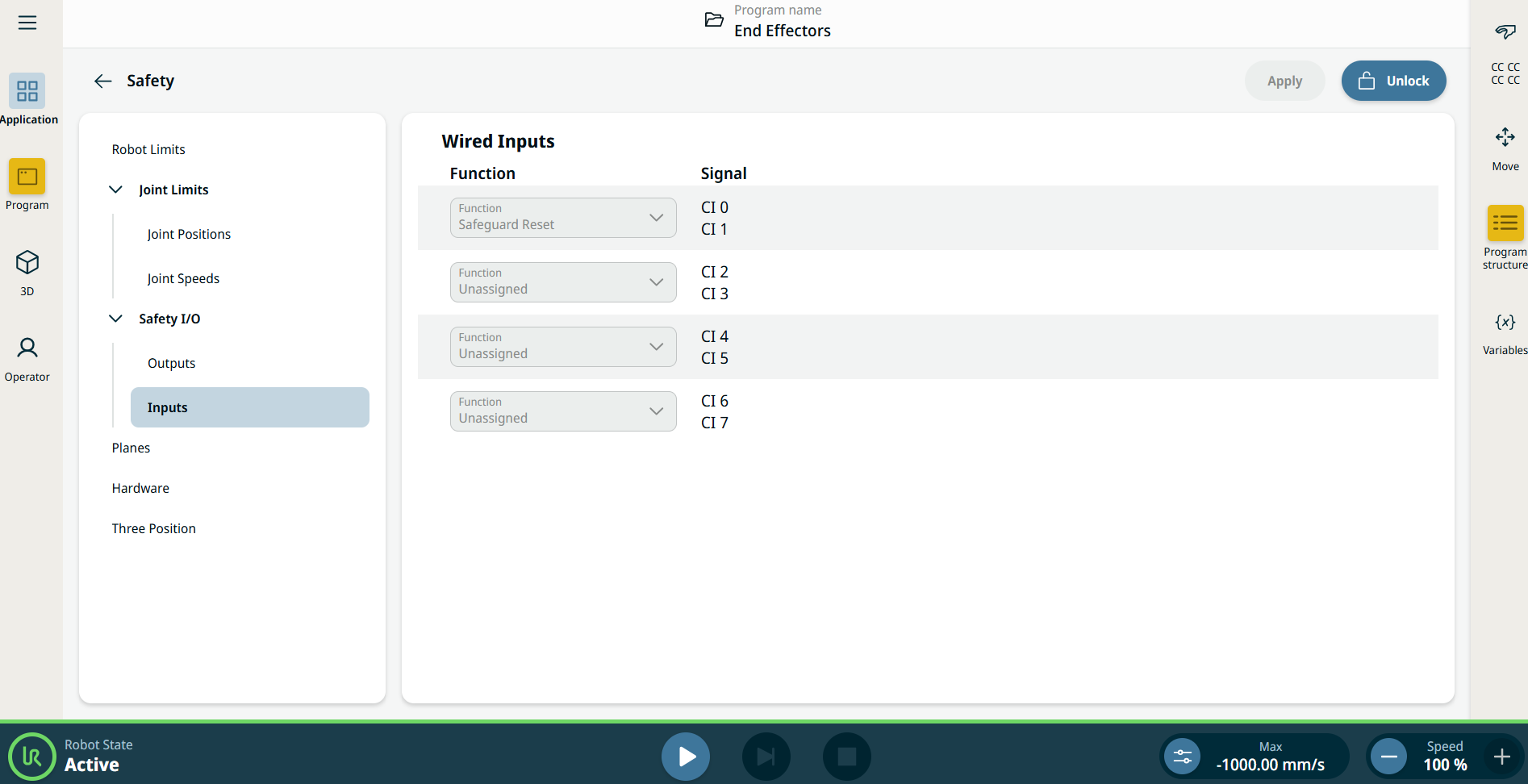
| Kontrollboks Innganger |
Innganene er beskrevet i tabellen nedenfor:
Når standard tilbakestilling av verneutstyr er deaktivert, skjer det automatisk når vernet ikke utløser en stopp. Dette kan skje dersom en person passerer feltet til vernet. Dersom en person ikke blir oppdaget av vernet og blir utsatt for farer, er automatisk tilbakestilling forbudt i henhold til standarder.
Når vernestopp i automatisk modus er aktivert, utløses ikke en vernestopp i manuell modus.
|
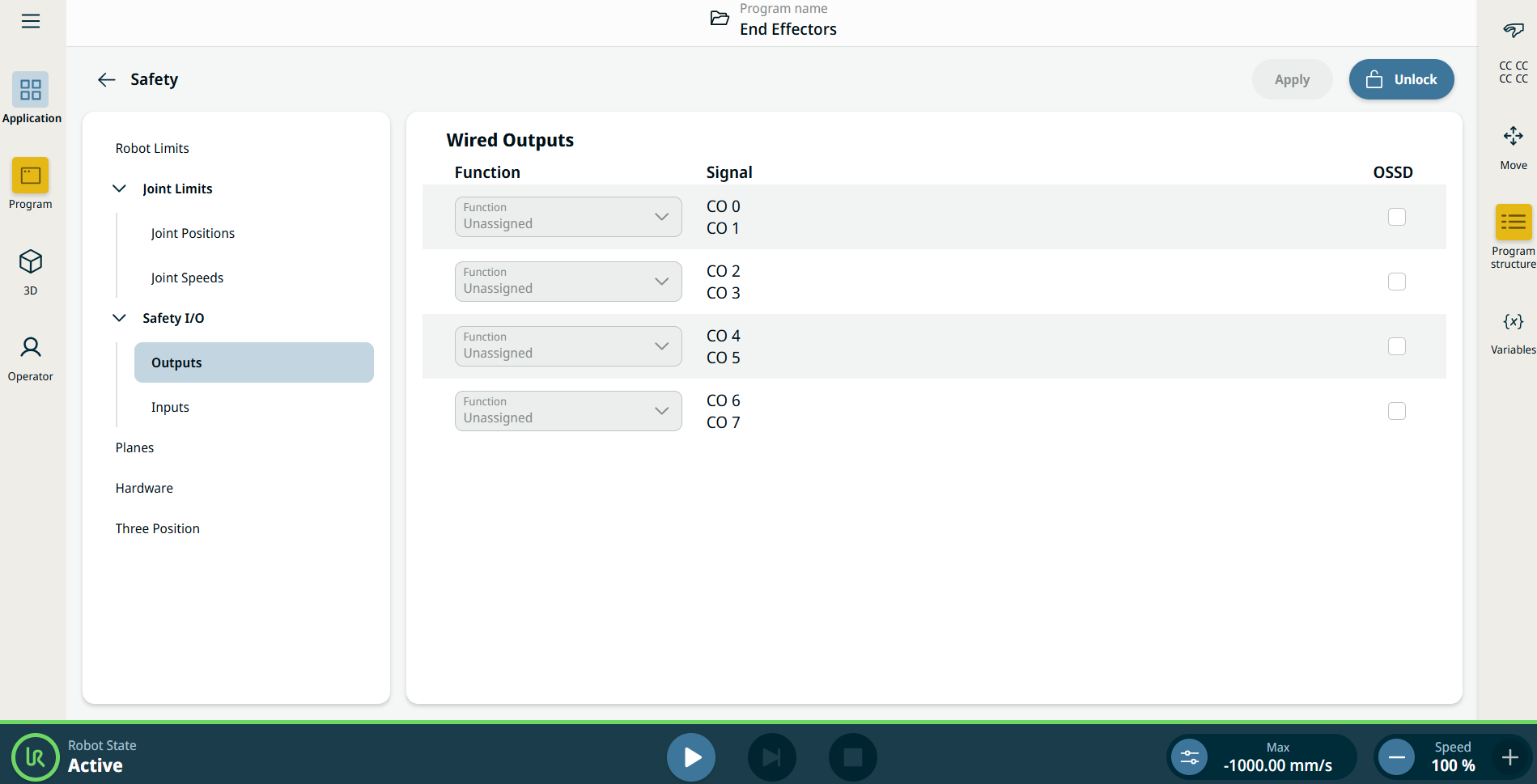
| Kontrollboksutganger |
Alle sikkerhetsutganger går lavt hvis det oppstår brudd på eller feil på sikkerhetssystemet. Dette betyr at systemstopp-utgangen initierer et stopp selv når en nødstopp ikke er utløst. Du kan bruke følgende sikkerhetsfunksjoner for utgangssignaler. Alle signaler går tilbake til lav når tilstanden som utløste høyt signal er fjernet:
Ethvert eksternt maskineri som får sin nødstopp-tilstand fra roboten gjennom systemstopp-utgangen må rette seg etter ISO 13850. Dette er spesielt viktig ved innstillinger hvor robotnødstopp-inngangen er koblet til en ekstern nødstopp-enhet. I slike tilfeller vil systemstopp-utgangen bli høy når den eksterne nødstopp-enheten utløses. Dette vil si at nødstopptilstanden for det eksterne maskineriet vil tilbakestilles uten at det krever en manuell handling fra robotoperatøren. Derfor, for at det eksterne maskineriet skal rette seg etter sikkerhetsstandardene, må det kreves en manuell handling for å kunne fortsette.
|