Robotbegrensninger
| Beskrivelse |
Robotbegrensninger begrenser generelle robotbevegelser.
Sikkerhetsgrensene begrenser kraft og bevegelser ved verktøyflensen og i midten av de to brukerdefinerte verktøyposisjonene
|
| Fartsbegrensninger | 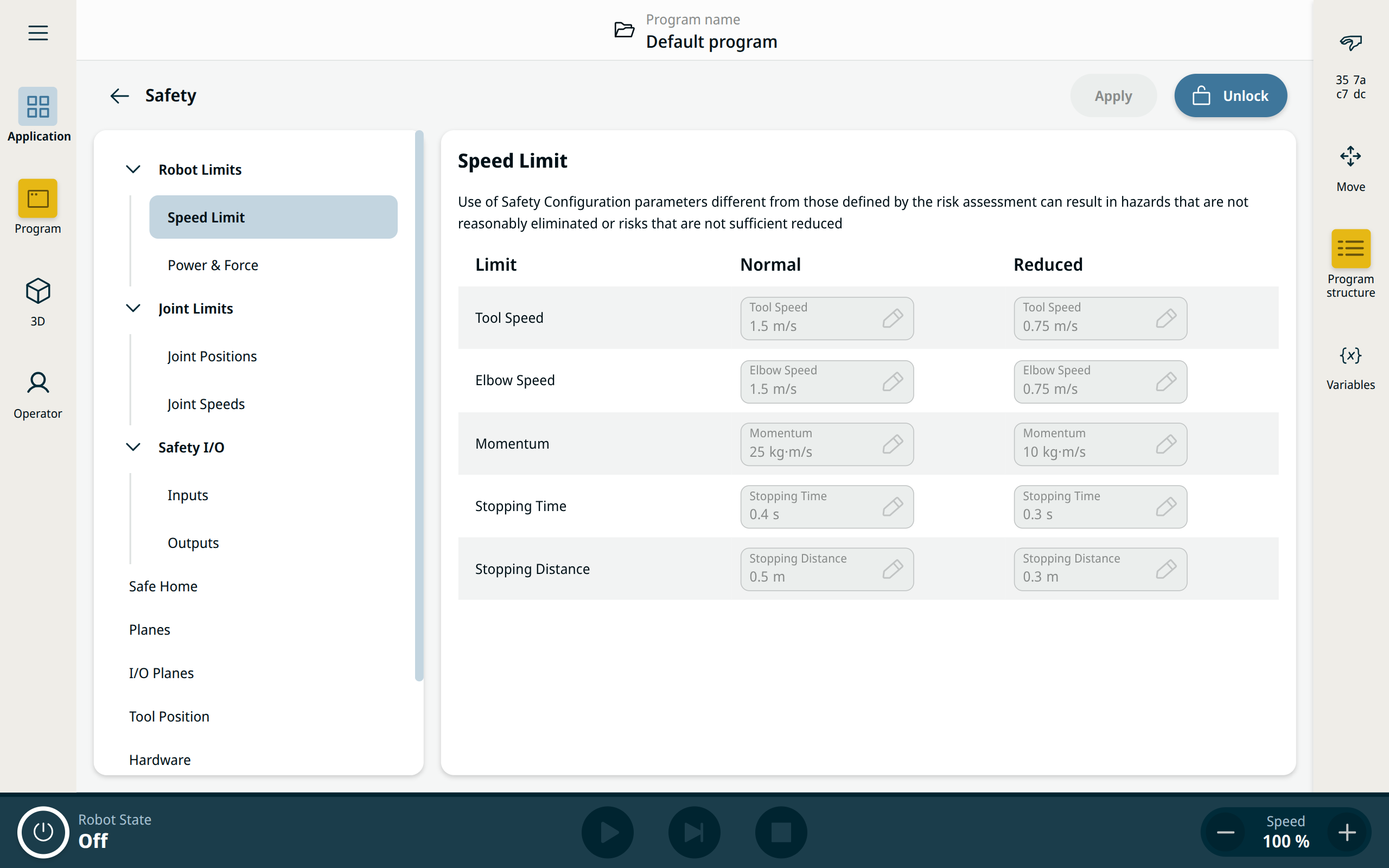
Begrensning av stopptid og avstand påvirker total robothastighet. For eksempel, hvis stoppetiden er satt til 300 ms, er maksimal robothastighet begrenset slik at roboten stopper innen 300 ms.
|
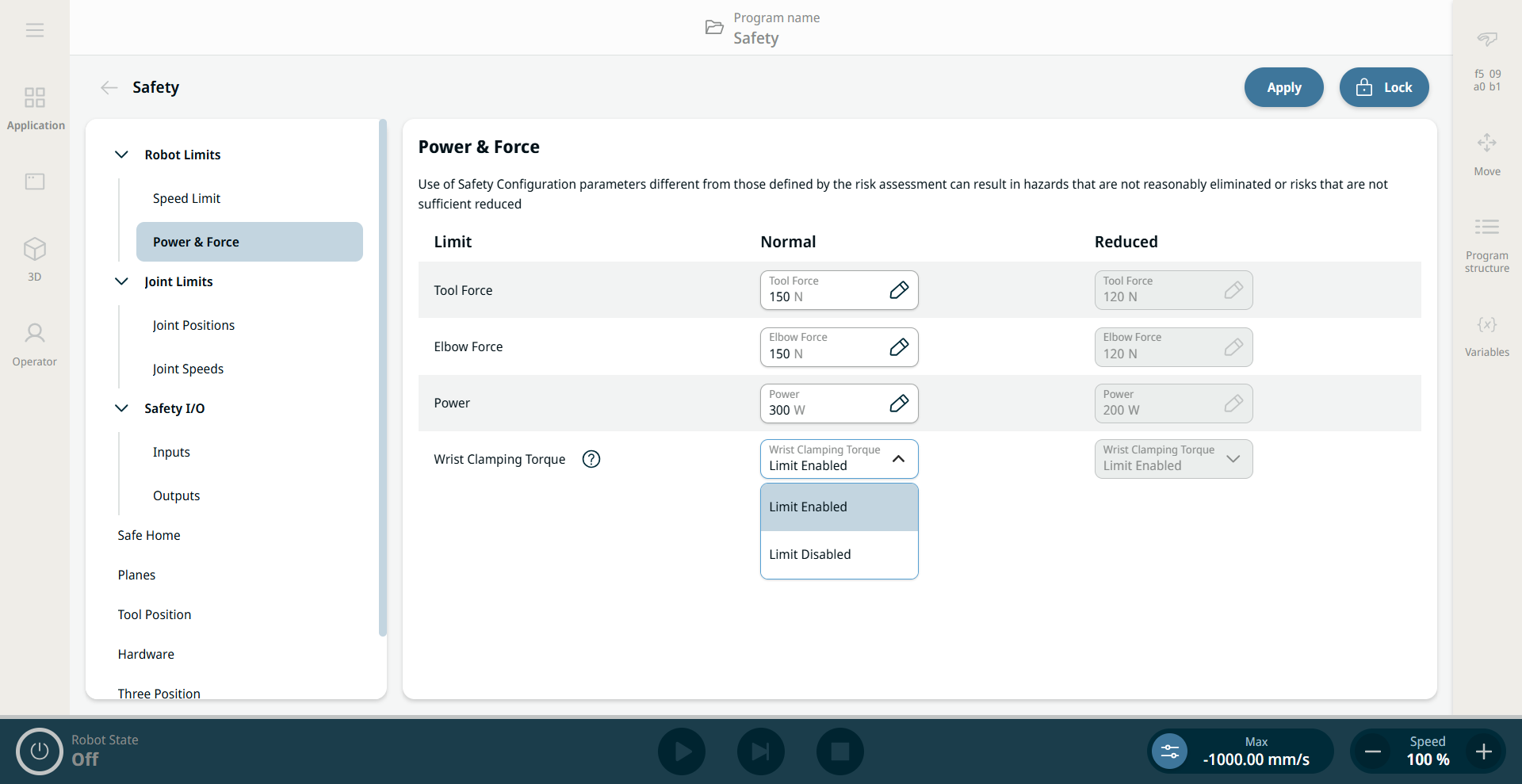
| Effekt og kraft |
Verktøy- og albuekreftene kan overskrides av de tre håndleddene hvis sikkerhetsfunksjonen «klemmemoment for håndledd» er deaktivert
|