I/O 平面
| 説明 |
I/Oプレーン機能は、標準のセーフティプレーンと比較して、セーフティプレーンをより柔軟に使用できます。 セーフティプレーン機能を提供します。 端子入力を使用してセーフティプレーンをアクティブ/非アクティブにしたり、セーフティ球がセーフティプレーンを横切ったときに出力信号を生成したりできます。
|
|
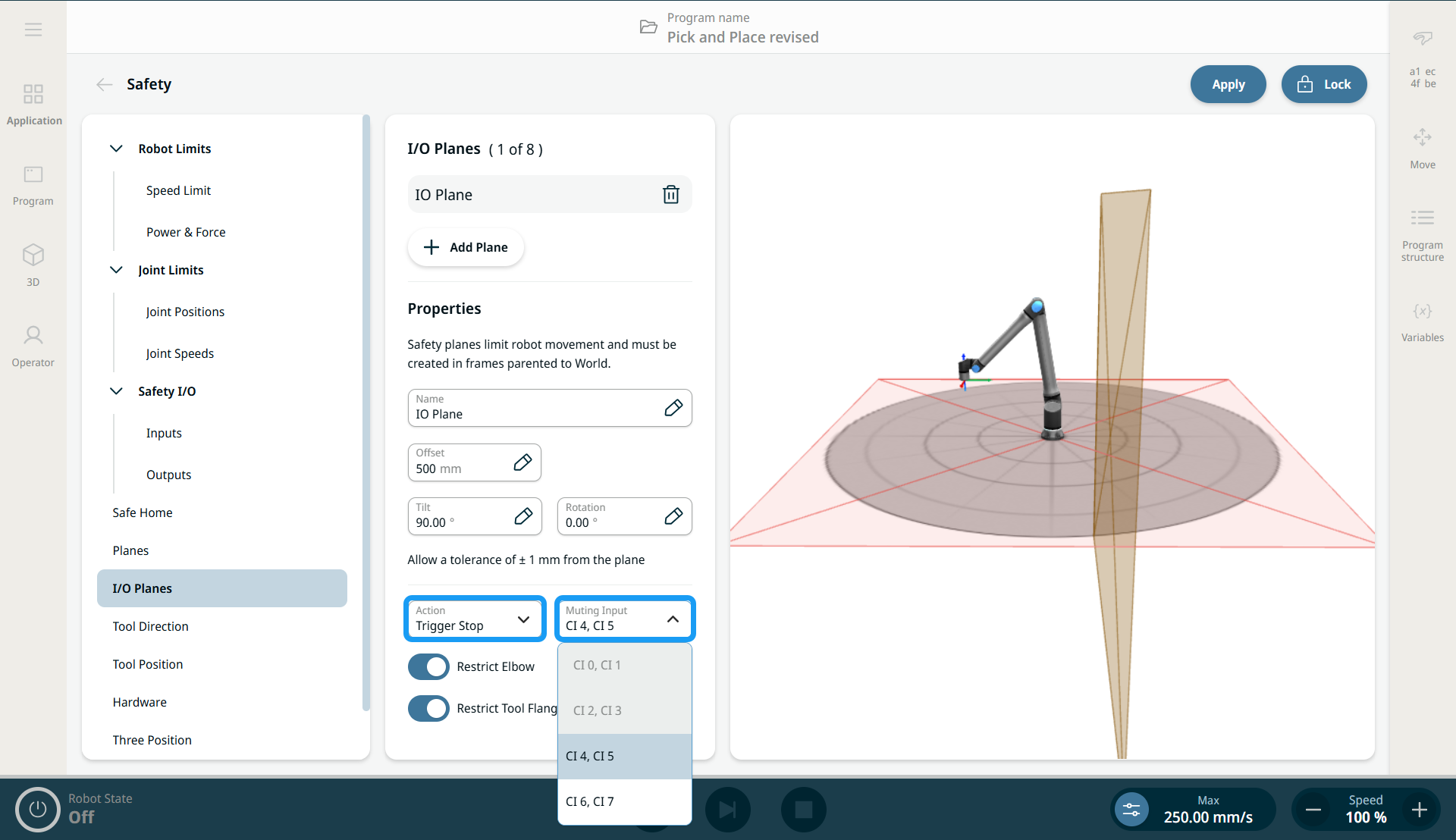
インプット/ストッププレーン |
トリガー停止は、I/Oプレーンの停止をトリガーする。 安全入力を使ってミュートすることができる。 ミュートしない限り、飛行機に向かって動くとロボットは停止し、安全入力が飛行機をミュートするまで待機する。 飛行機がアクティブでないときは、ロボットは自由に動くことができる。 平面がアクティブで、ロボットが平面を横切っていない場合、ロボットは平面を横切る前に停止する。 ロボットが平面の端を移動している間に平面が作動した場合、ロボットは平面を横切ってしまう可能性があり、最悪の場合、設定された距離と停止時間の制限に従って停止する。 平面が作動し、ロボットが平面を横切ると、ロボットは設定された停止距離と停止時間の制限に従って停止する。
|
|
|
|
|
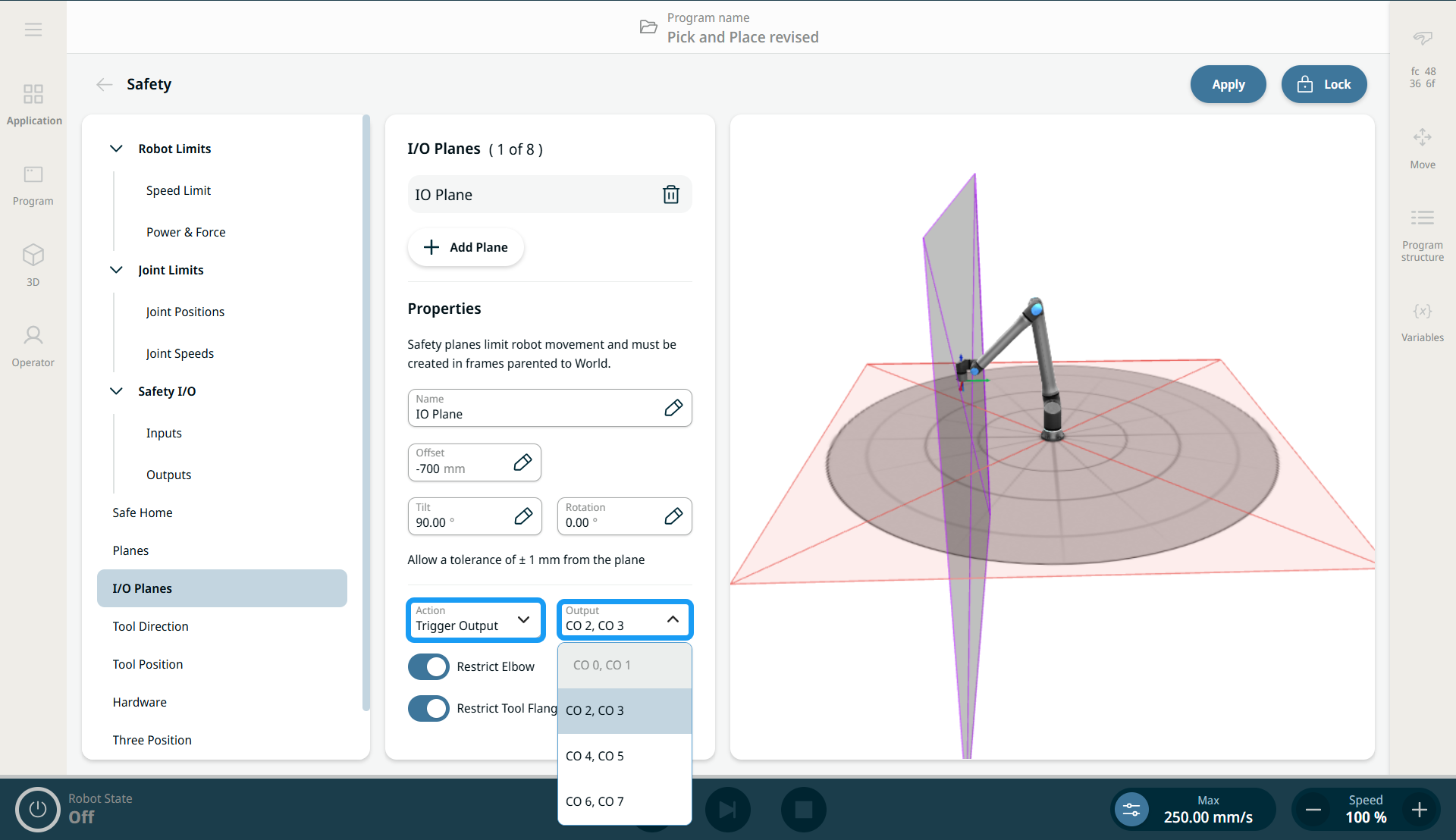
出力プレーン |
トリガ出力は、1 つまたは複数の安全球が平面を横切ったかどうかに基づいて安全出力を生成します。 1つまたは複数の安全球がトリガー出力として定義された平面を横切ると、その平面に対応する安全出力が作動する。 「アクティブ」とは、安全出力が電気的に「Low」に設定されていることを意味します。 安全球のいずれかがトリガ出力として定義された平面を横切ると、その平面に対応する安全出力がアクティブになる。
|