安全な家
| 説明 |
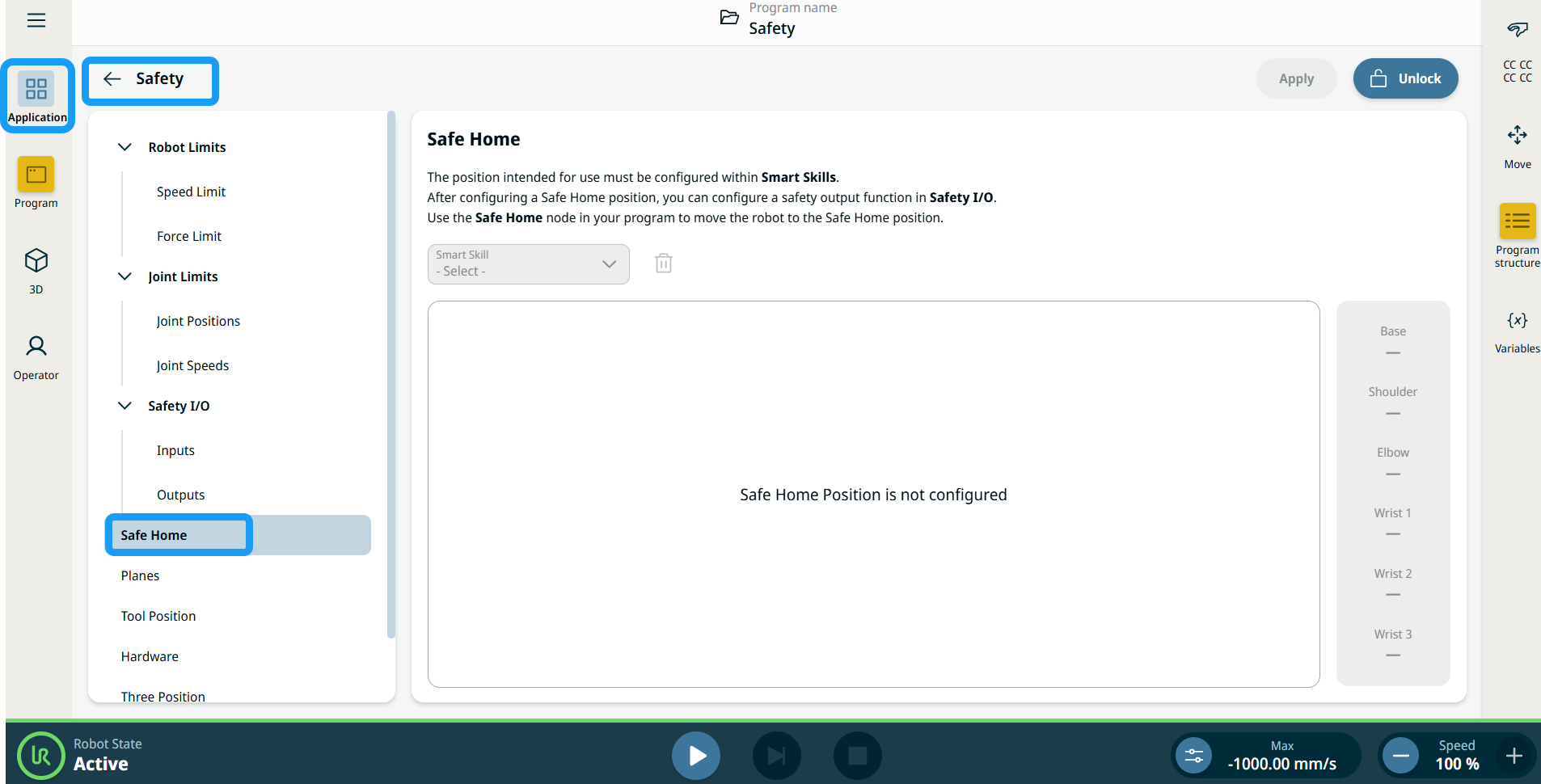
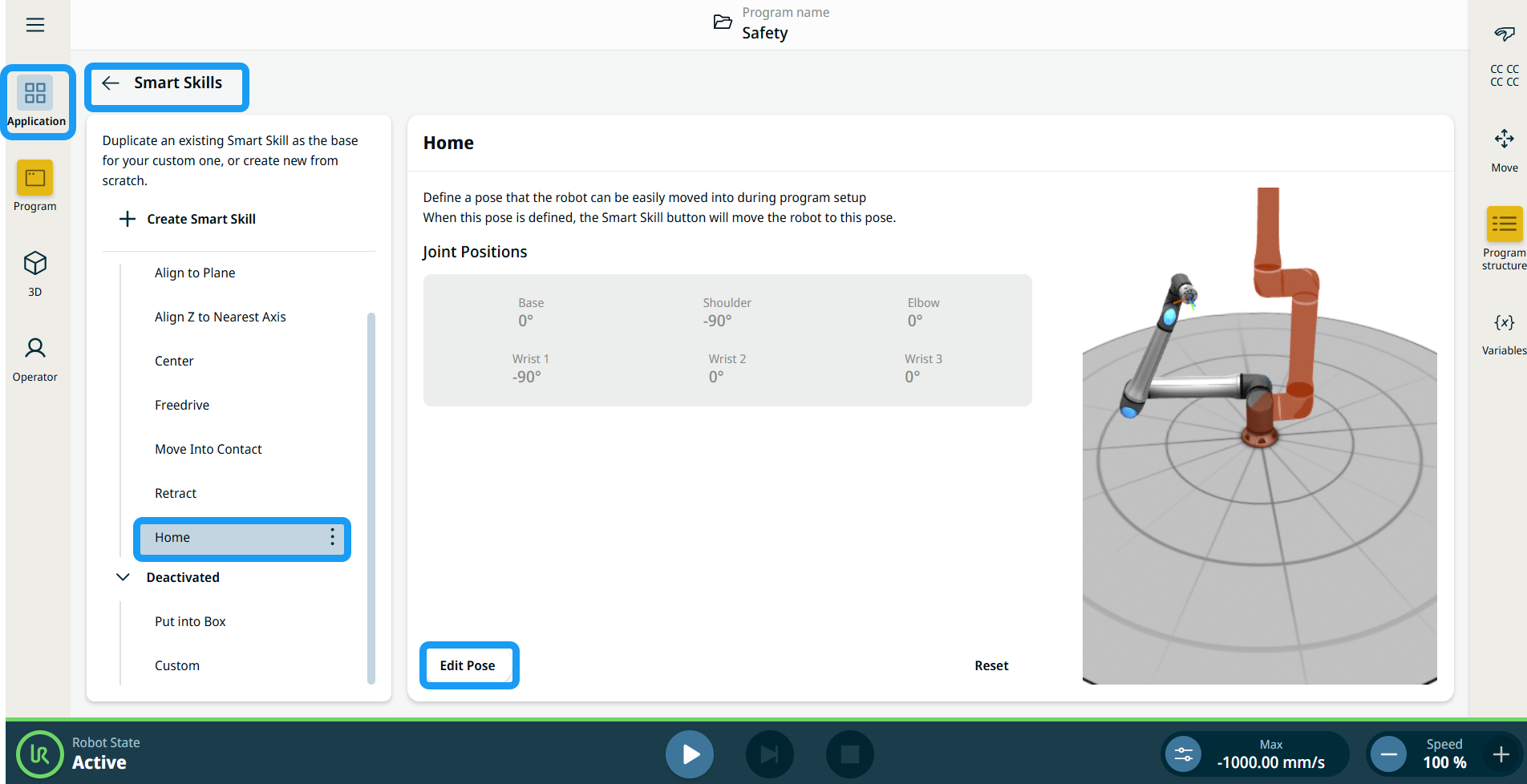
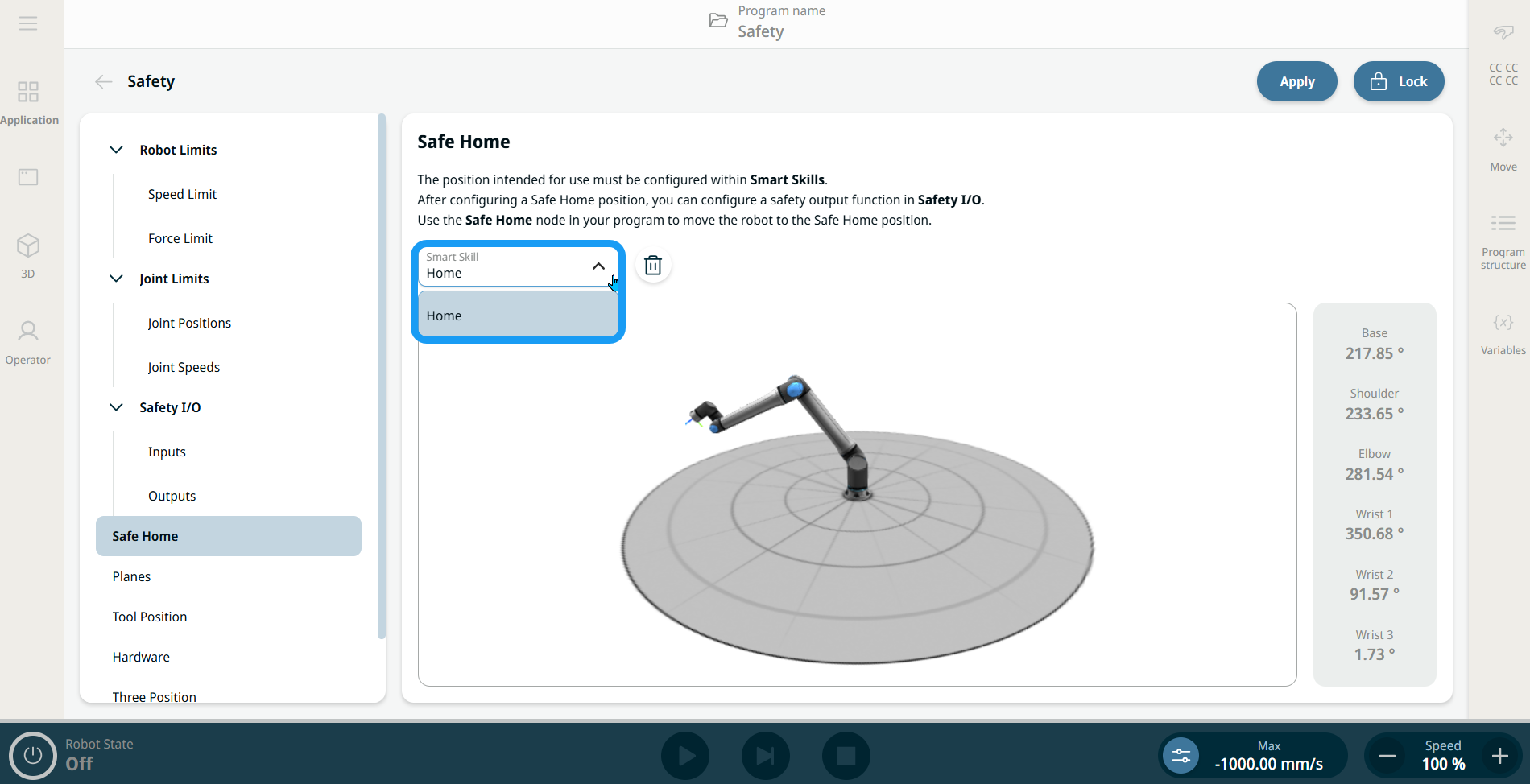
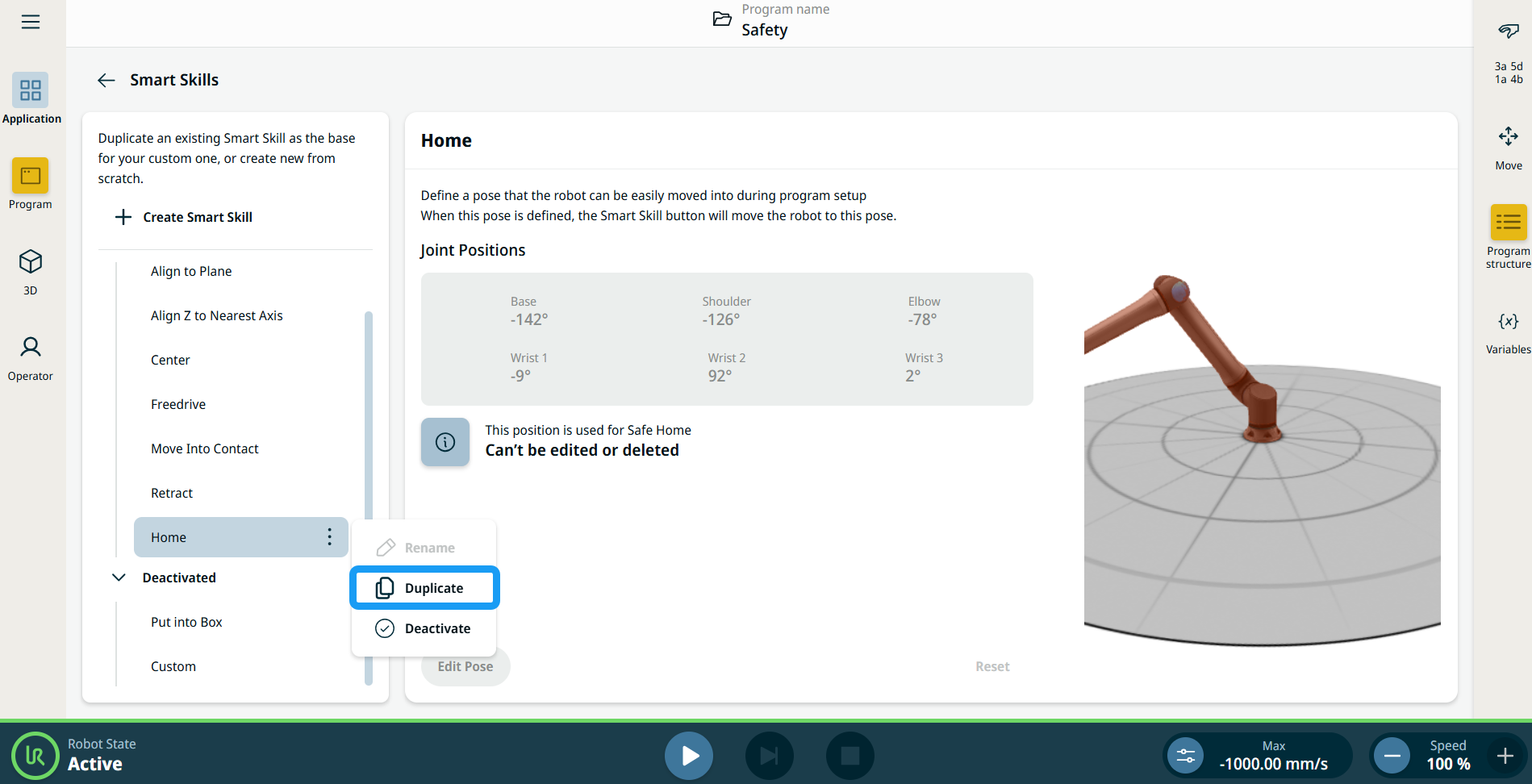
安全ホーム は PolyScope X の機能であり、ロボットが設定された安全ホーム位置に到達したときに作動する安全関連出力を定義できます。 ユーザーは、利用可能なスマートスキル位置のドロップダウンで [ホーム] を選択し、これを安全ホーム位置の基準として割り当てることができます。
|
|
安全ホームへのアクセス |
|
|
|
|
|
|
Service unavailable.
|
|
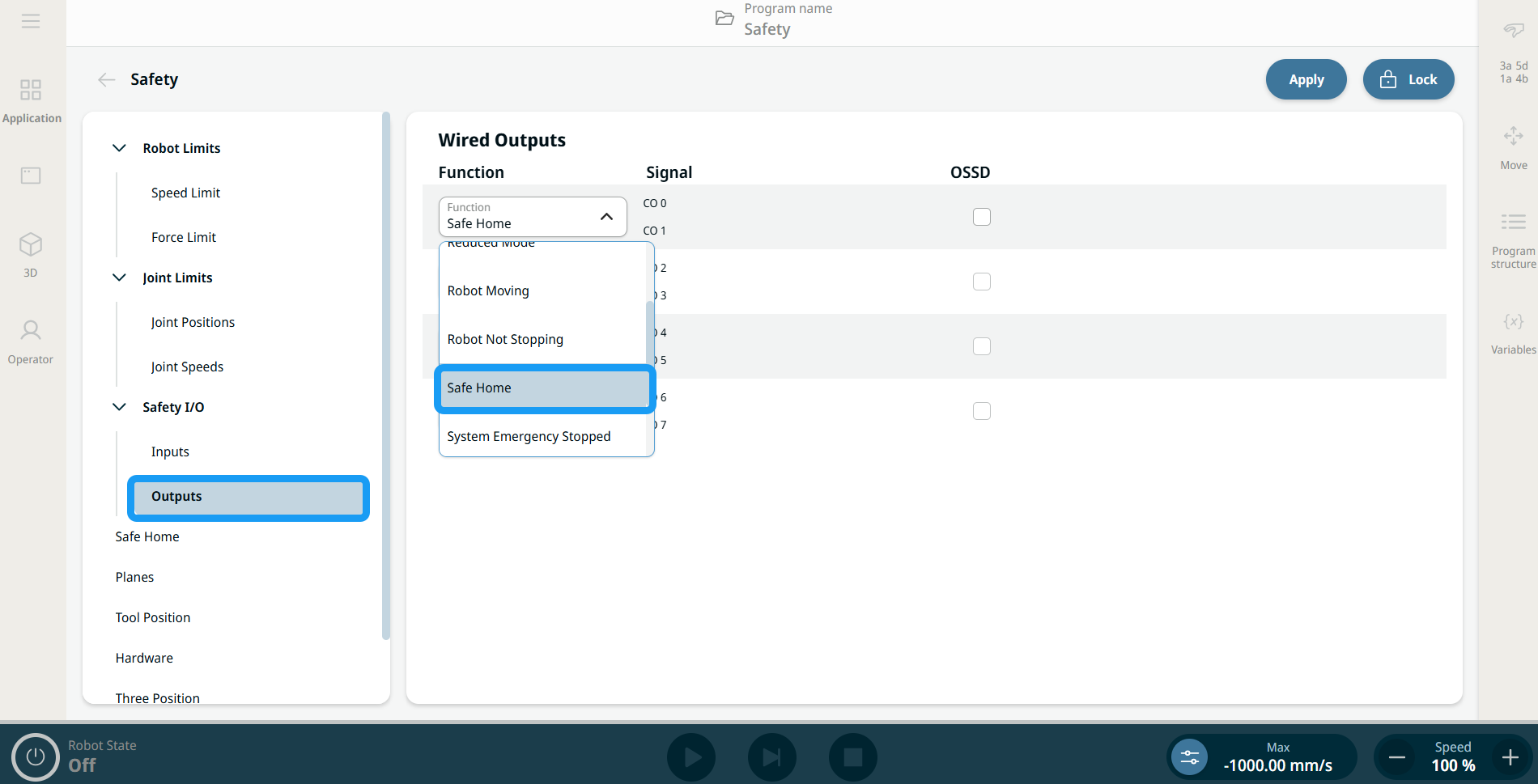
出力における安全ホーム機能 |
安全でホーム位置が位置スマートスキルに割り当てられている場合、安全出力機能のドロップダウンには新しい機能割り当てとして安全ホームが表示されます。 安全 I/O の [出力] 配下にある [機能] フィールドで [安全ホーム] を選択します。
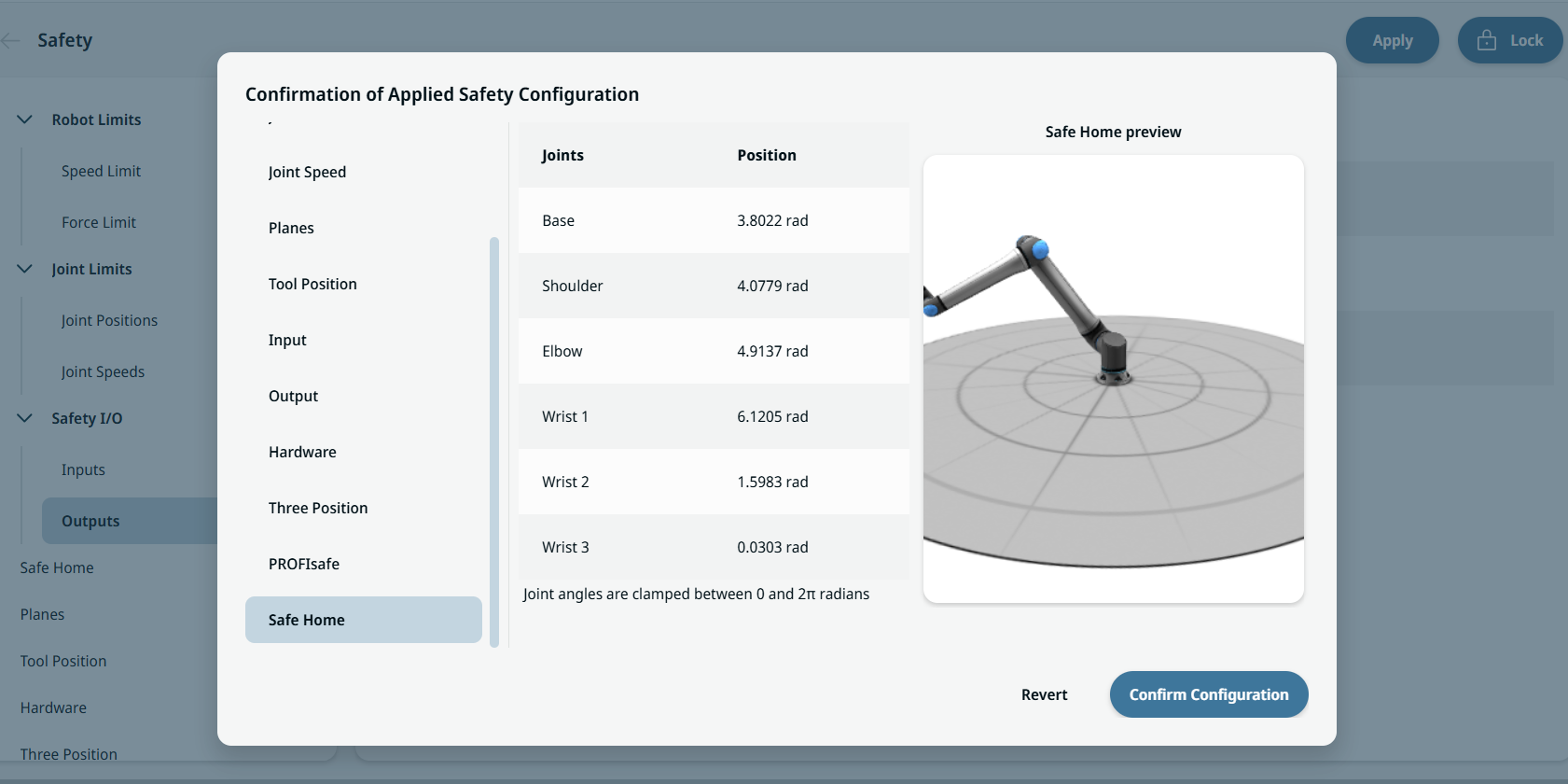
安全ホームは、適用された安全設定の確認の概要ダイアログにある機能割り当て表で確認できます。
|
|
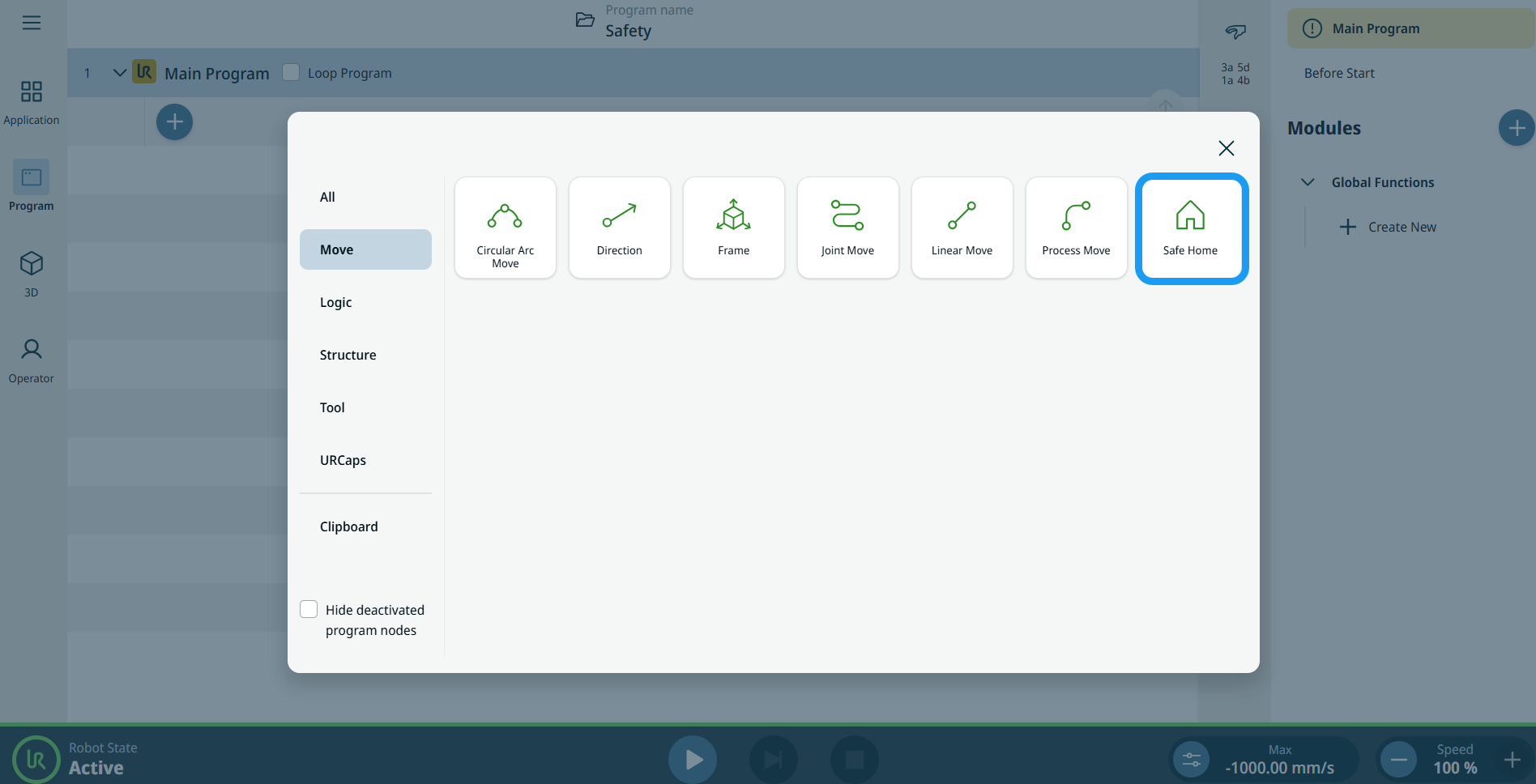
プログラムノードとしての安全ホーム |
安全ホームプログラムノードは、移動ノードカテゴリにあり、コマンドノード内に配置されています。 このノードは、安全アプリケーションの安全ホーム設定で構成された事前定義の安全ホームポジションへロボットを移動させるよう指令するために使用します。
安全設定で安全ホームポジションが構成されていない状態でこのノードを追加すると、ノードは黄色で表示されます。

[省略記号アイコン]
|
 をタップすると、安全ホームコマンドノードのモーションプロファイルオプションやその他の詳細設定が表示されます。
をタップすると、安全ホームコマンドノードのモーションプロファイルオプションやその他の詳細設定が表示されます。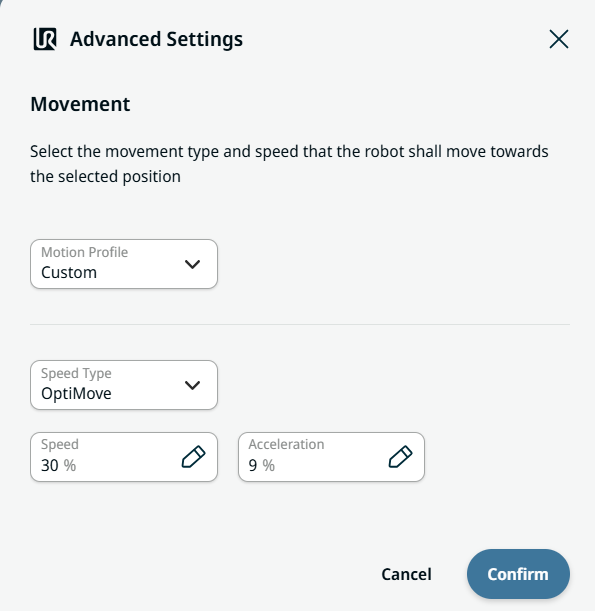
| 詳細設定 |
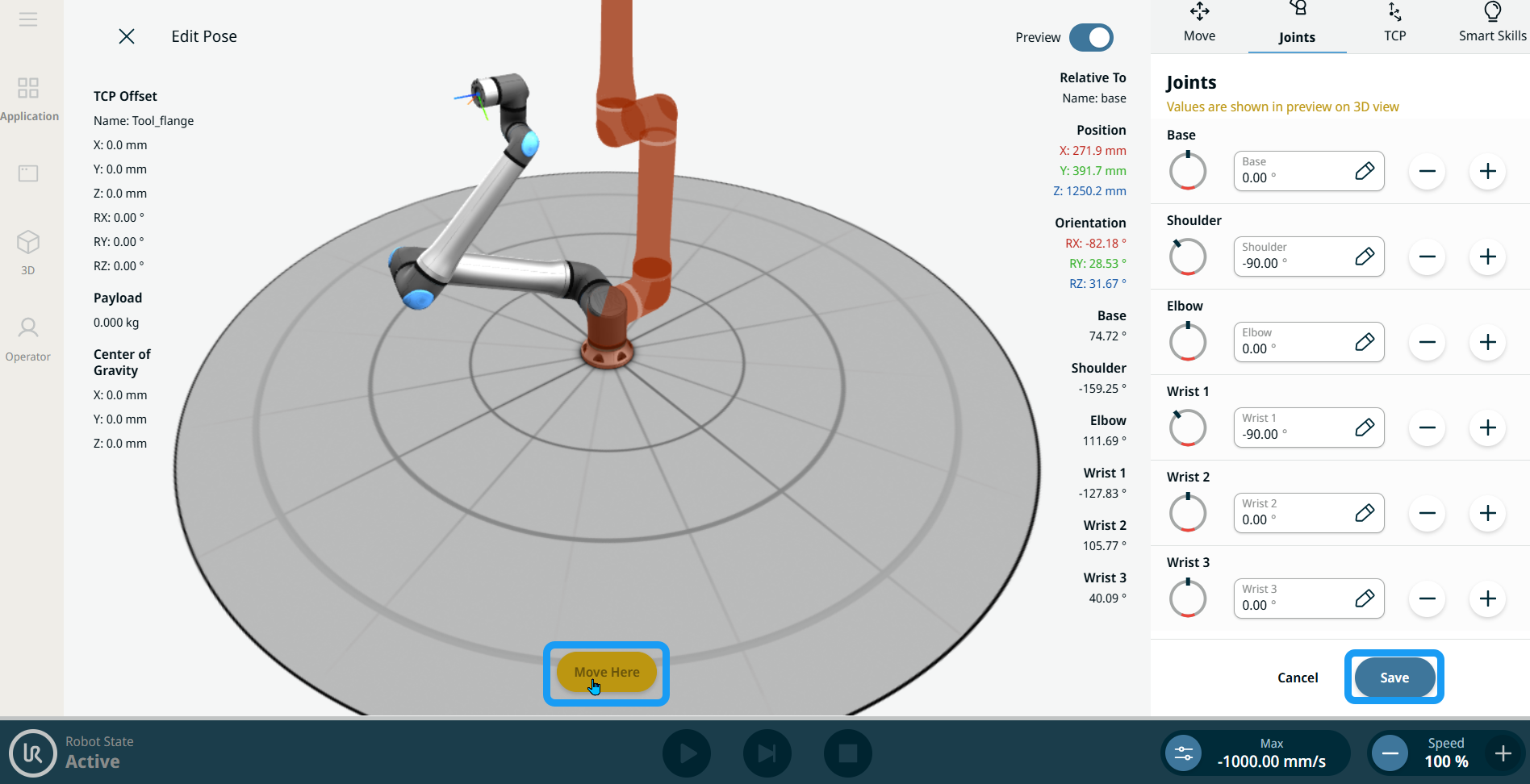
ユーザーは、詳細設定で 2 つのタブと 2 つのフィールドを使用して移動プロファイルを作成できます:
移動プロファイルは、移動ノード(ジョイント移動、直線移動、円弧移動、プロセス移動、方向)で事前定義の移動ロファイルを設定できる機能です。 カスタムモーションプロファイルを使用すると、移動ノードで移動データを定義できます。 速度の種類フィールドでは、OptiMove が既定のオプションです。 速度と加速度を秒あたりの度数または秒あたりのmmで入力したい場合は、 Classicの 動作を選択してください。 OptiMove の設定は、使用とセットアップを簡素化するためにパーセンテージ(%)で指定します。 ユーザーは [速度] タブで希望する速度の割合を設定できます。これは、目標移動速度をロボットの最大速度能力に対する割合として設定します。 ユーザーは [加速度] タブで希望する加速度の割合を設定できます。これは、加速および減速時の目標トルク限界をロボットの最大出力に対する割合として設定します。
|