安全 I/O
| 説明 |
I/O には入力と出力があり、各機能がカテゴリー 3 と PLd I/O 機能を提供するように対になっています。
I/O またはフィールドバス入力からプログラムを開始する場合、ロボットは現在の位置から移動を開始できます。PolyScope を介して最初のウェイポイントまで手動で移動する必要はありません。
|
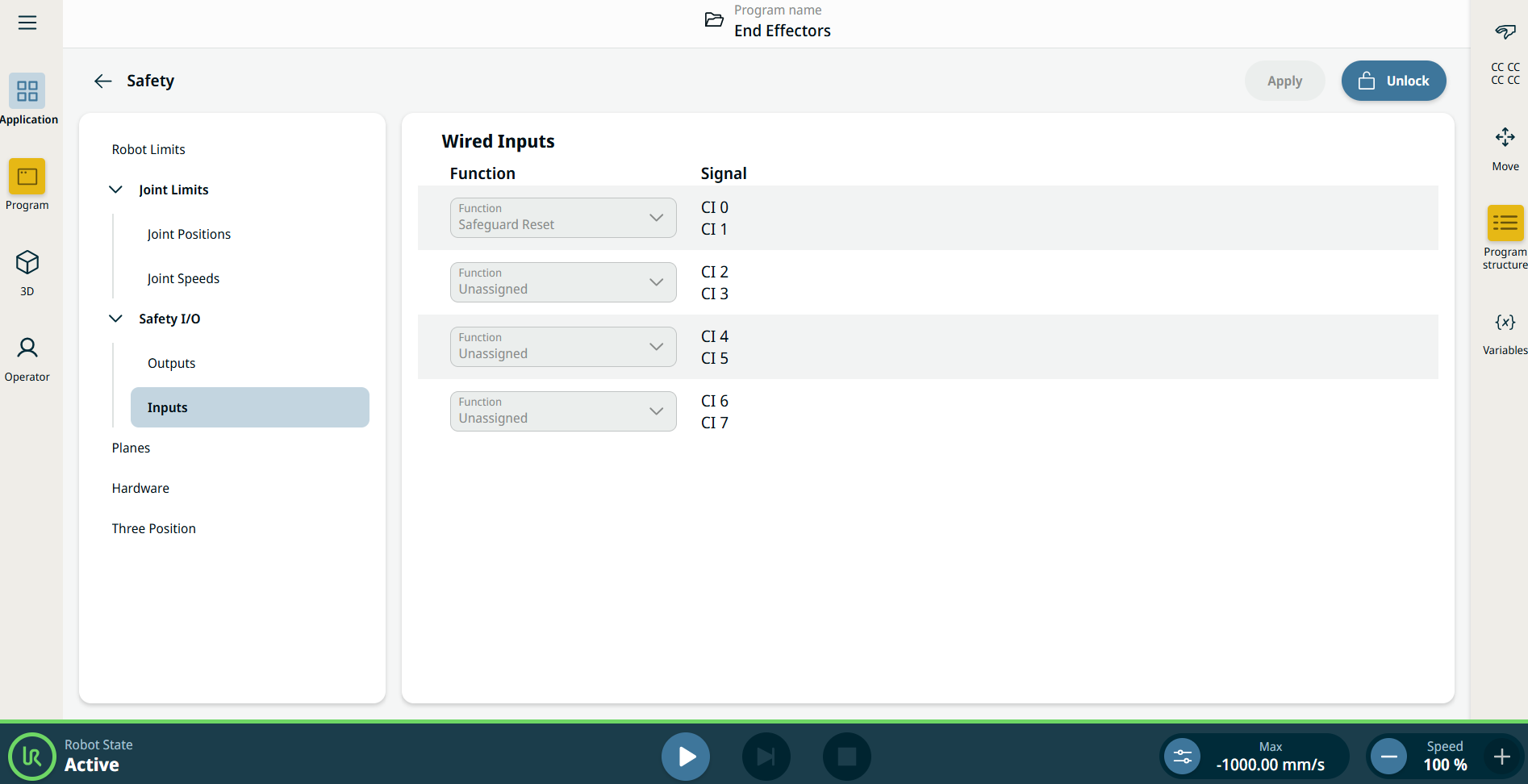
| コントロールボックス 入力 |
入力内容は以下の表に記載されています:
デフォルトの予防リセットが無効になっている場合、予防が停止をトリガーしなくなったときに自動リセットが行われます。 これは、人が安全装置の領域を通過した場合に発生する可能性があります。 安全装置によって人が検出されず危険にさらされている場合、自動リセットは規格によって禁止されています。
自動モードの予防停止が有効になっている場合、手動モードでは予防停止はトリガーされません。
|
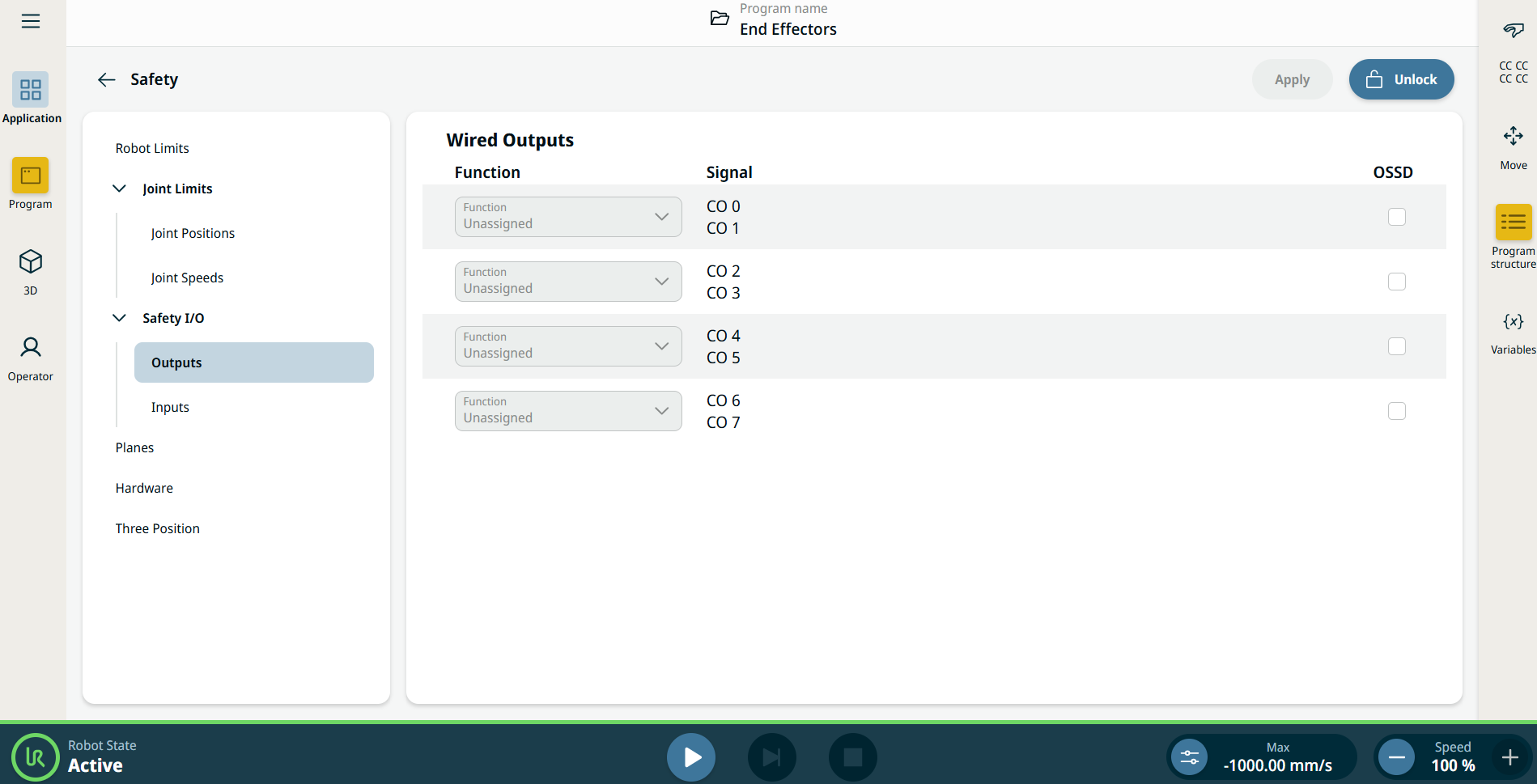
| コントロールボックスの出力 |
安全システムに違反または障害が発生した場合、すべての安全出力は Low になります。 つまり、非常停止がトリガーされない場合でも、システム停止出力が停止を開始するのです。 以下の安全機能出力信号を使用できます。 すべての信号は、High 信号をトリガーした状態が終了すると Low に戻ります:
システム停止出力を通じてロボットの非常停止状態を受信する外部機械はすべて、 ISO 13850 規格に準拠している必要があります。 ロボット非常停止入力が外部非常停止デバイスに接続されている場合、この要件は特に設定において重要となります。 この場合、外部非常停止デバイスが解除された際に、システム停止出力は High となります。 これは、外部の機械で非常停止状態がリセットされ、ロボットのオペレーターによる手動操作が不要であることを意味します。 つまり、安全規格に準拠するには、外部機械を再始動する際に手動操作を行う必要があります。
|