Utilizzo della messa in posizione del robot
Spostare il robot in posizione permette al braccio del robot di spostarsi in quella posizione di partenza, dopo aver completato un programma. Il braccio del robot deve essere nella posizione di partenza prima di poter eseguire il programma.
Per maggiori informazioni, consultare la sezione Muovi il robot in posizione nel manuale utente del robot.
Per utilizzare il pulsante 3PE per spostare il braccio del robot in posizione:
-
Quando il programma è completo, premere Riproduci
-
Selezionare Riproduci dall'inizio.
Su PolyScope, appare la schermata Muovi il robot in posizione che mostra il movimento del braccio del robot.
-
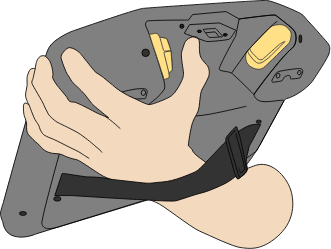
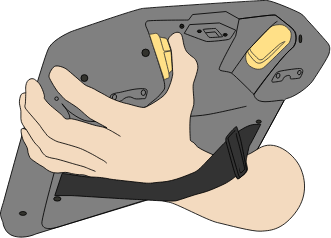
Light-press and hold the 3PE button.
-
Now, on PolyScope, press and hold Automove, for the robot arm to move to the start position.
Viene visualizzata la schermata Riproduci programma.
-
Mantenere una pressione leggera sul pulsante 3PE per eseguire il programma.
-
Rilasciare il pulsante 3PE per interrompere il programma.