Utilisation de Mettre le robot en position
Déplacer le robot en position permet au bras du robot de se déplacer vers cette position de départ après avoir terminé un programme. Le bras du robot doit être en position de départ avant de pouvoir exécuter le programme.
Pour plus d'informations, reportez-vous à la section Mettre le robot en position du manuel utilisateur du robot.
Pour utiliser le bouton 3PE pour mettre le bras du robot en position :
-
Lorsque votre programme est terminé, appuyez sur Lecture
-
Sélectionnez Lecture depuis le début.
Dans PolyScope, l'écran Mettre le robot en position apparaît, affichant le mouvent du bras du robot.
-
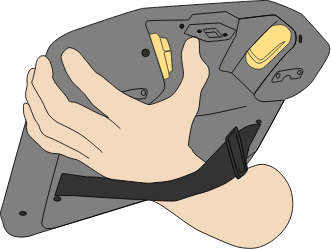
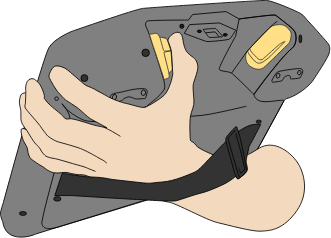
Light-press and hold the 3PE button.
-
Now, on PolyScope, press and hold Automove, for the robot arm to move to the start position.
L'écran Lancer le programme s'affiche.
-
Maintenez une légère pression sur le bouton 3PE pour exécuter votre programme.
-
Relâchez le bouton 3PE pour arrêter votre programme.