Uso de Poner robot en posición
«Poner robot en posición» permite mover el brazo robótico a la posición inicial después de completar un programa. El brazo robótico debe estar en la posición inicial antes de ejecutar el programa.
Por más información, consulte la sección Poner robot en posición del Manual de usuario del robot.
Para usar el botón 3PE para poner al brazo robótico en posición:
-
Cuando su programa esté completo, pulse Reproducir
-
Seleccione Reproducir desde el principio.
En PolyScope, aparecerá la pantalla Poner robot en posición, que mostrará el movimiento del brazo robótico.
-
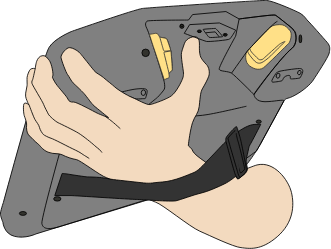
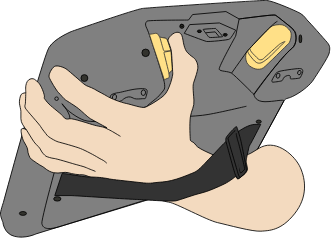
Light-press and hold the 3PE button.
-
Now, on PolyScope, press and hold Automove, for the robot arm to move to the start position.
Se mostrará la pantalla Reproducir programa.
-
Mantenga pulsado suavemente el botón 3PE para ejecutar el programa.
-
Suelte el botón 3PE para detener su programa.