Begrenzung des Klemmdrehmoments vom Handgelenk
| Beschreibung |
Begrenzung des Klemmdrehmoments vom Handgelenk ist eine Einstellung, welche das Begrenzen des maximalen Klemmdrehmoments für die Handgelenke des Roboters aktiviert oder deaktiviert. Die Begrenzung ist standardmäßig aktiviert. Diese Sicherheitsfunktion begrenzt, wie viel Drehmoment das Handgelenk beim Schieben aufbringen kann.
|
|
Details zur Begrenzung des Klemmdrehmoments vom Handgelenk |
Wenn sie aktiviert ist, begrenzt der Roboter das Drehmoment in den Handgelenken, um ein Einklemmen zwischen Handgelenk, Nutzlast und dem Unterarm des Roboters zu verhindern. Wenn die Einstellung aktiviert ist, definiert sie auch eine nicht sicherheitsrelevante Obergrenze für die angewendeten Drehmomentfenster der Basis, Schulter und des Ellbogengelenks. In kraftgesteuerten Anwendungen können die erreichbaren Kontaktkräfte deutlich niedriger sein als die Kräfte, welche in den Sicherheitsfunktionen Werkzeugkraftbegrenzung und Ellbogenkraftbegrenzung angegeben wurden.
Wenn sie deaktiviert ist, kann der Roboter mit den Handgelenken eine höhere Schubkraft aufwenden, wie zum Beispiel bei kraftgesteuerten Anwendungen. Wenn die Funktion deaktiviert wird, müssen die Risiken des Einklemmens zwischen dem Handgelenk, der Nutzlast und dem Unterarm des Roboters anderweitig gemildert werden. Diese Sicherheitsfunktion ist bei allen Robotern standardmäßig aktiviert. In PolyScope X Version 10.12 und neuer ist es möglich, diese Sicherheitsfunktion zu deaktivieren.
|
|
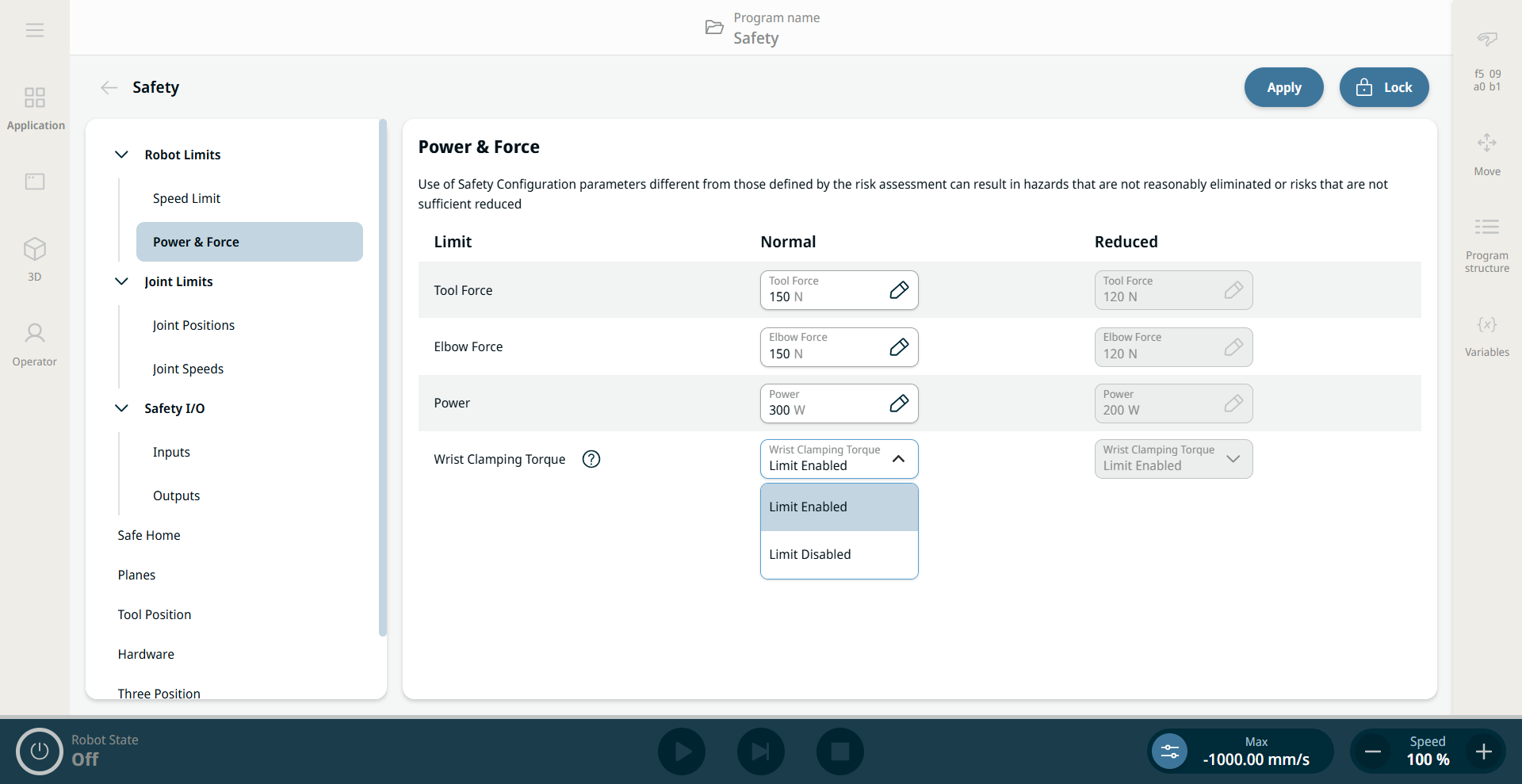
Begrenzung des Klemmdrehmoments vom Handgelenk aktivieren und deaktivieren |
|