PolyScope X: Drive Power Indicator
| Description |
The drive power indicator is a light that turns on when the robot arm is powered on, or when there is power to the robot cable. When the robot arm is powered off, the drive power indicator turns off.
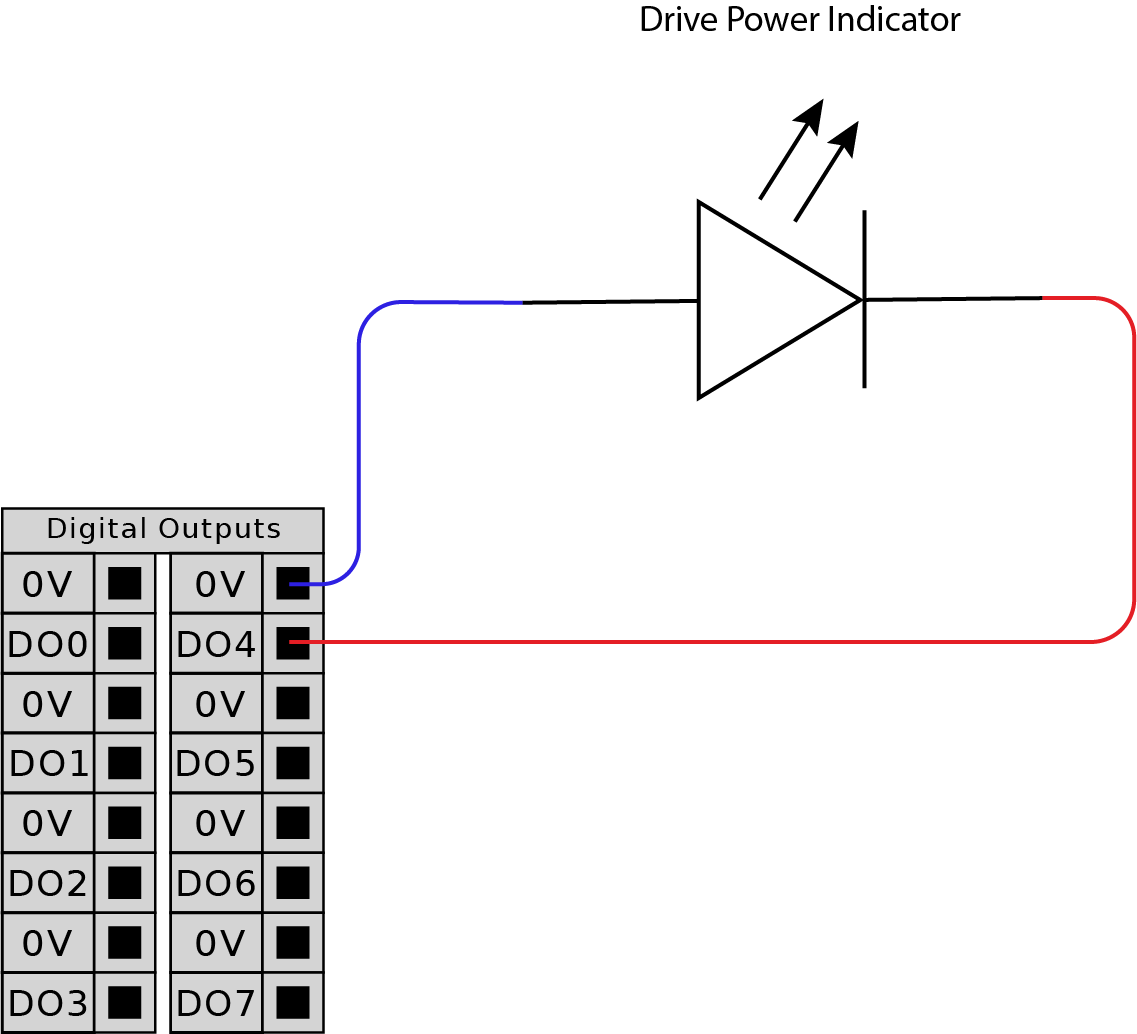
The drive power indicator is connected via the Digital Outputs. It is not a safety feature and does not use safety I/Os.
|
| Indicator |
The drive power indicator can be a light that can work at 24VDC.
|
| To set up the indicator |
Setting up the indicator requires a light and wiring for the outputs.
|
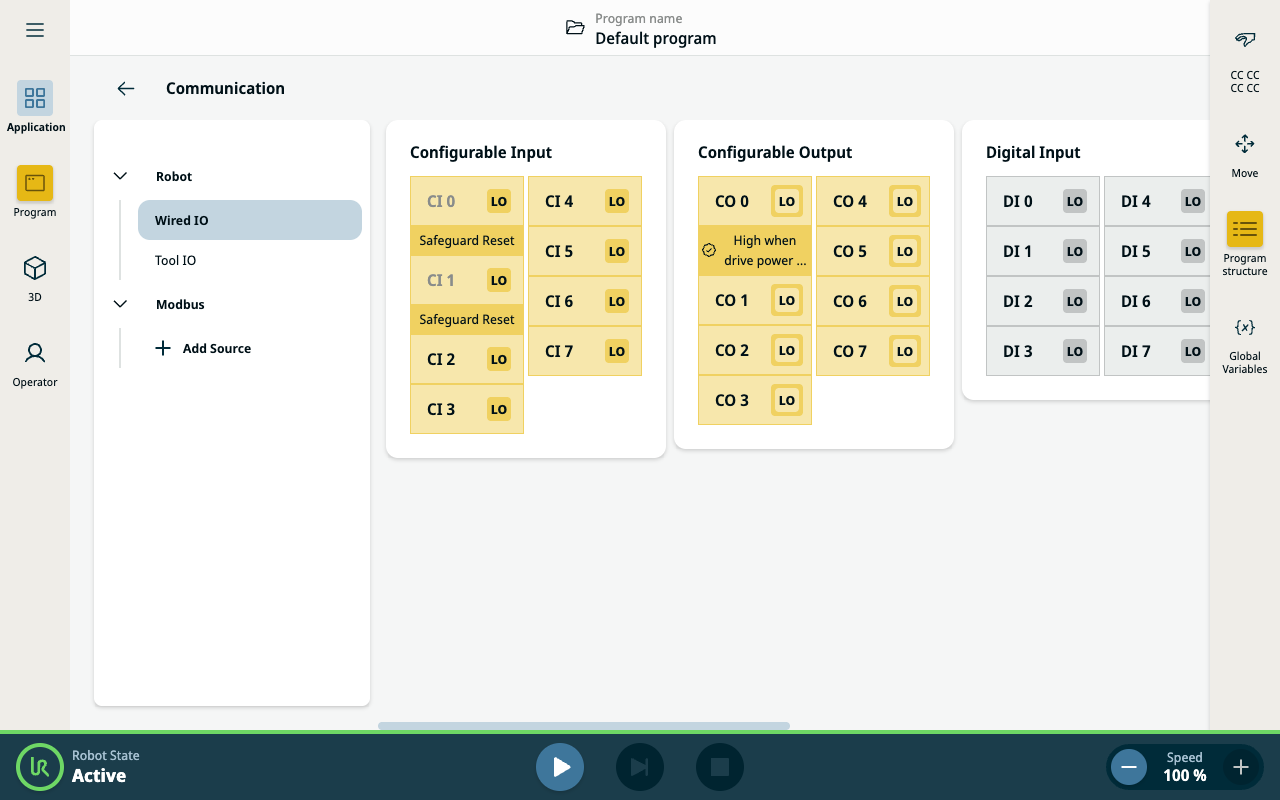
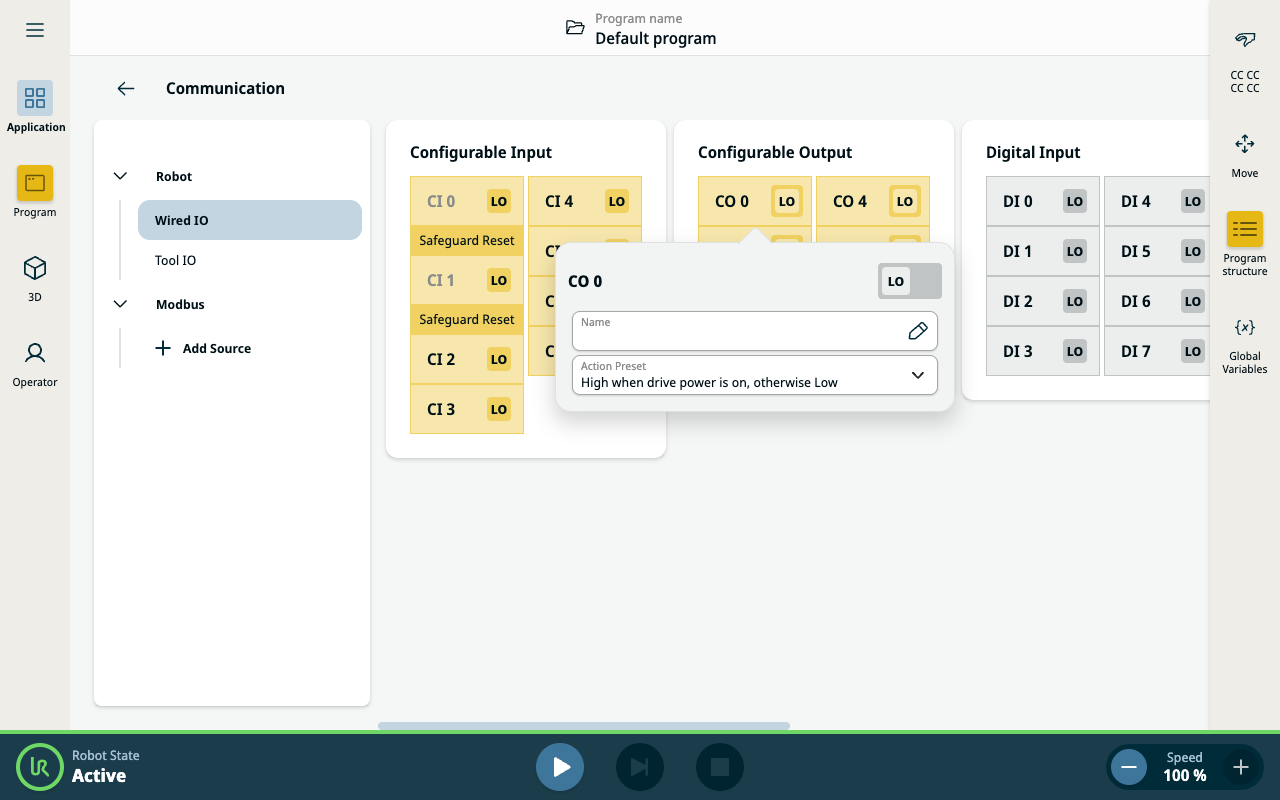
| To configure the indicator |
|