

코봇은 바람직하지 않은 작업을 인수하고 조립 및 포장을 30% 최적화합니다.
요약하자면
드릴 및 나이프 샤프너 제조업체인 Darex 는 많은 반복적이고 인체 공학적으로 불친절한 작업으로 빠르게 진행되는 생산 라인을 운영합니다. 이 회사는 스크류 구동 및 박스 세우기에 유니버설 로봇 (Universal Robots) 을 구현하여 초기 설치를 유니버설 로봇 (Universal Robots) 인터페이스를 통해 프로그래밍된 여러 워크 스테이션이 있는 완전한 자동화 라인으로 신속하게 확장했습니다. 전체 시스템은 자체적으로 개발됩니다.
오리건 주 애슐랜드에 본사를 둔 4세대 가족 소유 회사인 다렉스 (Darex) 는
더 많은 인력을 고용하지 않고도 라인에 더 많은 제품을 추가해야 했습니다. 다렉스 (Darex) 의 존 그리핀 (John Griffin) 운영 이사는 애슐랜드 (Ashland) 지역은 가용 근로자의 부족을 겪고 있다고 설명하면서 "기본적으로 동일한 양의 자원으로 더 많은 일을 해야 한다" 고 말했다. Darex Darex 역시 새로운 전용 공간이 필요하지 않은 해결책이 필요했습니다. "우리는 생산 구역이 작기 때문에 별도의 셀이 필요하지 않지만 조립 라인에 바로 들어갈 수 있는 것을 원했습니다." 라고 Griffin은 말합니다. Griffin은 상자를 세우고 제품 상자로 포장하는 스테이션과 함께 칼 연마기의 플라스틱 하우징을 조립하는 회사의 나사 구동 응용 프로그램을 자동화하려고 했습니다. 상자를 세우는 경우, 회사는 상자 생성자를 사용하는 것을 고려했습니다. “그러나 그들은 그들이 할 일에 제한이 있었고 특정 범위의 상자에서만 작업했습니다. 우리는 더 많은 유연성을 원했습니다." 라고 Griffin은 말합니다.
Darex
솔루션
그리핀은 많은 무역 박람회에서 유니버설 로봇 (Universal Robots) 을 보았습니다. "그들은 프로그래밍하기 쉬운 것처럼 보였고, 로봇을 판매하지 않는 벤더들도 부스에서 이 로봇을 사용하고 있었습니다." 라고 그는 회상합니다. “그래서 그런 종류가 ‘와, 이게 정말 인기 있는 거구나.’” 코봇 (cobots) 이 널리 사용되는 이유 중 하나는 경로에서 장애물이 발생하면 코봇 암 (cobot arm) 을 자동으로 정지시키는 내장 안전 메커니즘 때문입니다. 일단 위험 평가를 수행하면, 코봇 (cobots) 은 안전 케이지 없이 작동할 수 있습니다. 운영 이사는 "이제 케이지 뭉치 없이 코봇 (cobots) 바로 옆에서 사람들이 일할 수 있습니다." 라고 말합니다.
John Griffin, Director of operations, Darex약 30% 더 효율적으로 운영되고 있습니다. 해당 라인을 실행하는 데 필요한 직원이 적기 때문에 유연성이 높아져 사람들을 다른 영역에 집중시키고 다른 제품을 실행할 수 있습니다. 이전에는 주당 2개의 제품만 만들었으나 이제는 주당 4개의 제품을 만들 수 있습니다.

1년 이내에 ROI 달성, 효율성 30% 증가
값비싸고 번거로운 안전 가딩에 자원을 투자하지 않아도 협업 로봇을 가격 측면에서 매력적으로 만드는 데 도움이 되었습니다. Griffin은 "cobots 구매에 대한 ROI의 경우 처음에는 약 16개월이 걸릴 것으로 예상했습니다." 라고 말합니다. Griffin은 UR cobots 가 1 년 이내에 스스로 비용을 지불하는 것을 보면서 긍정적으로 놀랐습니다. “우리는 약 30% 더 효율적으로 운영되고 있습니다. 해당 라인을 실행하는 데 필요한 직원이 적기 때문에 유연성이 높아져 사람들을 다른 영역에 집중시키고 다른 제품을 실행할 수 있습니다. 다렉스 (Darex) 는 이제 일주일에 두 가지 제품만 생산하는 대신, 일주일에 네 가지 제품을 생산할 수 있게 되었습니다.
나사 구동: 자동화를 위해 잘 익은 낮은 매달린 과일
나이프 샤프너를 조립하는 작업은 다렉스 (Darex) 가 자동화 프로젝트를 시작하는 논리적인 장소처럼 보였습니다. Griffin은 "전통적으로 공압식 스크류 건을 사용하는 작업자는 스크류 프리젠터에서 나사를 회수하여 기계에 부착하고 토크로 구동합니다. 이는 매우 단조롭고 인체 공학적으로 매우 불친절한 작업입니다." 라고 말합니다. 이 바람직하지 않은 작업에서 작업자를 완화하기 위해 Darex 는 UR3 탁상용 cobot 을 선택했습니다. 이 회사는 스크류 프리젠터와 스크류 건으로 정확히 동일한 설정을 유지할 수 있었습니다. 유일한 차이점은 현재 작업을 수행하는 코봇 (cobot) 이었습니다. 다렉스 (Darex) 의 생산 엔지니어링 감독관인 샘 제이콥슨 (Sam Jacobson) 은 하우징의 구멍을 들여다보기 어려웠기 때문에 작업자가 나사 삽입을 놓치는 방법을 설명합니다. "UR3는 항상 모든 나사에 부딪히며 그렇지 않은 경우 즉시 알려줍니다." 라고 그는 말합니다. “We have definitely seen an increase in product quality due to the cobots.”


코봇 (cobot) 은 뇌가 됩니다.
스크류 구동 애플리케이션의 성공으로 Darex 는 새로운 조명으로 전체 조립 라인 설정을 빠르게 살펴볼 수 있었습니다. Jacobson은 "첫 번째 적용이 순조롭게 진행된 이후, 우리는 앤티를 올리고 컨베이어 시스템과 공압 프레스와 같은 것을 제어하는 모든 PLC를 추가하고 복싱 측면에 다른 UR 로봇을 추가하기로 결정했습니다." 라고 말합니다. "저는 실제로 UR 컨트롤러를 사용하여 전체 라인을 프로그래밍하고 처리하기로 결정했습니다. Modbus 통신을 사용하여 UR cobot 티치 펜던트를 통해 다른 PLC를 연결했습니다." 라고 그는 설명합니다. “저는 그 모든 것을 빠르게 프로그래밍할 수 있었고, 그 결정에 정말 만족했습니다.”

박스 세우기: UR5는 다단계 사이클을 처리합니다
상자를 접어 모양을 만들고 제품으로 포장하는 것은 Darex 의 또 다른 인기 없고 인체 공학적으로 불친절한 작업이었습니다. 유니버설 로봇 (Universal Robots) 의 중형 코봇 UR5 이 인수하여 현재 코봇 (cobot) 이 카세트에서 상자를 꺼내 접어 모양을 만드는 전체 사이클을 처리하고 있습니다. 접힌 상자를 스테이징 플랫폼에 놓고 컨베이어에 도착하는 네 개의 개별 상자를 잡고 상자에 적재합니다. 상자가 가득 차면 코봇 (cobot) 이 뚜껑을 닫고 테이핑 스테이션을 통해 상자를 밀어냅니다.
DAREX의 새로운 로봇 기술자가 되기 위한 콘테스트
다렉스 (Darex) 가 처음 코봇 (cobots) 을 구입했을 때, 생산 감독관은 생산팀이 그들 사이에 로봇을 갖는 것에 대해 흥분할 수 있는 방법을 생각하려고 노력했습니다. 그는 또한 모든 로봇 작업을 감독할 수 있는 로봇 기술자가 되기 위해 전담 직원이 필요했습니다. “그래서 저는 이 작은 경쟁을 생각해 냈습니다.” 라고 Griffin은 말합니다. “저는 모든 사람들에게 UR Academy 웹 주소를 제공하고, 이에 대해 공부하라고 말했고, Academy 지식을 활용하여 직무 경쟁에 초대했습니다." UR Academy 는 기본적인 UR cobot 프로그래밍 및 설정을 다루는 9개의 대화형 온라인 모듈로 구성됩니다. 다렉스 (Darex) 는 직원들이 코봇 (cobots) 을 프로그래밍해야 하는 여러 라운드의 콘테스트를 개최했습니다. 우승자는 26세의 Brittany Mohrman입니다. “다른 일을 할 수 있는 기회를 얻게 되어 정말 기뻤습니다. 그래서 바로 뛰어들어 경쟁에서 이기는 것을 목표로 할 수 있는 모든 것을 배웠습니다. UR 교육을 통해 다양한 프로그램 주기를 이해하고, 웨이포인트 변경 사항을 조정하고, 로봇의 공구 중심점이 어디에 있는지 파악할 수 있었습니다. 이제 제 일이 확실히 더 흥미로워졌어요.”

팔레타이징은 다음 단계입니다
다렉스 (Darex) 가 자동화하고자 하는 다음 작업은 테이프 밀봉 스테이션을 빠져나올 때 상자를 팔레타이징하는 것입니다. Griffin은 "많은 제품과 상자는 크기와 모양이 매우 유사하기 때문에 다음 번에 사용하기에 좋을 것 같습니다." 라고 말합니다. "또한 직원들이 항상 손을 뻗고 구부리지 못하게 할 것입니다. 우리가 이미 만든 조립 라인을 보면, 우리는 그것을 쉽게 가져다가 생산 영역에서 두세 번 더 복제하고 다른 제품과 동일한 작업을 수행할 수 있습니다."

효율적인 포장 자동화
유니버설 로봇 (Universal Robots) 의 UR5 코봇 (UR5 cobot) 은 다렉스 (Darex) 에서 전체 박스 세우기 및 포장 사이클을 처리합니다. 코봇 (cobot) 은 골판지를 카세트에서 꺼내 접어 모양을 만들고 네 개의 상자를 추가하고 뚜껑을 닫고 테이프 실러를 통해 아웃바운드 컨베이어 아래로 밀어 넣습니다.

생산성 보호
UR 코봇 (UR cobots) 에는 cobot arm이 경로에서 예기치 않은 장애물을 만나면 자동으로 멈추게 하는 힘 제한 안전 시스템이 내장되어 있습니다. 추가 안전 예방 조치로 Darex 는 직원이 작업 봉투의 경계를 설명하는 바닥 (오른쪽에 표시됨) 의 노란색과 검은색 줄무늬 선을 통과할 때 활성화되는 영역 스캐너를 추가했습니다. 영역 스캐너가 활성화되면 로봇에 신호를 보내 작동 속도를 늦춥니다. 직원들이 작업 봉투를 벗어날 때, 코봇 (cobot) 은 평소와 같은 속도를 얻습니다.

Young Talent Shines
26세의 브리타니 모어만 (Brittany Mohrman) 은 다렉스 (Darex) 의 ’새로운‘ 로봇 기술자입니다. ’그녀는 UR Academy 를 통한 무료 온라인 로봇 교육 모듈을 사용하여 회사의 프로그래밍 콘테스트에서 우승했습니다.
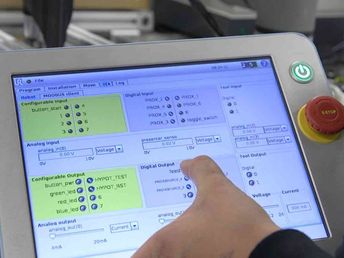
원활한 제어 및 모니터링
Modbus 제어 스테이션과 모든 입력 및 출력, 실시간 상태에 대한 개요는 UR cobot 자체 티치 펜던트를 통해 바로 확인할 수 있으며, 운영자는 이제 전체 조립 라인을 제어할 수 있습니다.

해결된 자동화 과제:
효율성 30% 향상 달성 주당 4회의 제품 빌드와 과거의 2회의 제품 빌드를 지원하는 생산 유연성 스크류 구동 애플리케이션의 제품 품질 향상 안전 케이지 없이 자동화할 수 있어 라인 작업자와 나란히 작업할 수 있습니다. 라인 가동 중지 또는 중단 없이 유지보수 필요 없음 반복적이고 인체공학적으로 불친절한 워크플로우 제거
핵심 가치 동인:
12개월 미만 ROI 쉬운 프로그래밍 협업적이고 안전함 UR 컨트롤러를 통해 전체 조립 라인을 제어하는 기능
협업 로봇이 해결한 작업:
박스 세우기, 포장 나사 구동 조립 라인 제어
유니버설 로봇과 연락하세요
수천 개의 기업이 협동 로봇을 활용하여...
- 생산성 향상
- 변화하는 제품 수요에 적응
- 직원 복지 및 유지 개선
- 노동력 부족 문제 해결