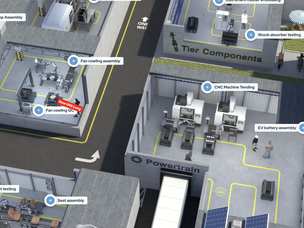





Autonomous Mobile Robots for Line Feeding and Material Flow
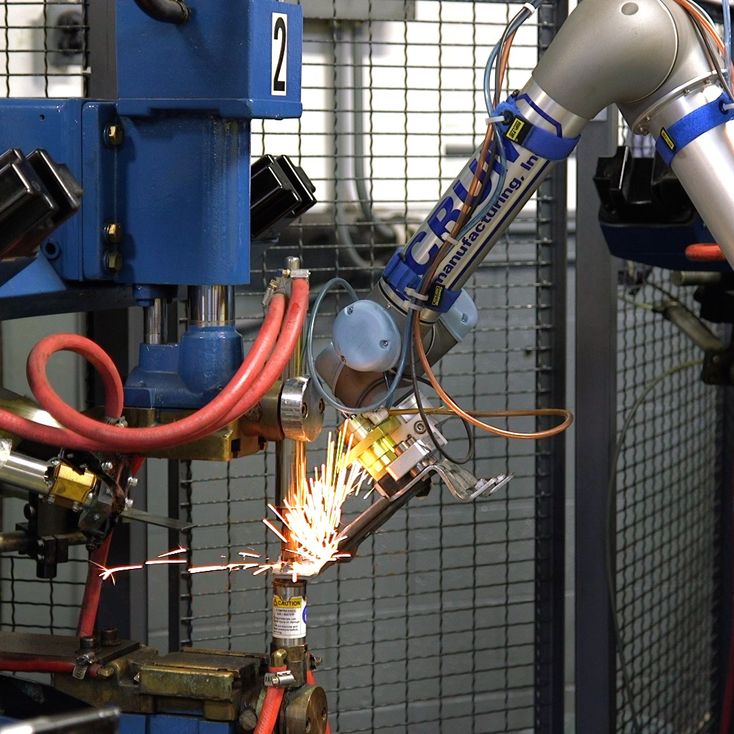
MiR AMRs support automotive frame welding by ensuring uninterrupted material flow across stamping, bending, welding, inspection and painting processes in the body shop.
Transport of subframes, pillars, panels, towers, rails and subassemblies between process steps
Autonomous delivery of consumables and spareparts to welding operations
Reduction of manual cart pushing and forklift traffic on the shop floor
By decoupling material transport from fixed conveyors, MiR robots help stabilize takt time and allow operators to focus on inspection, troubleshooting, and process control rather than logistics.