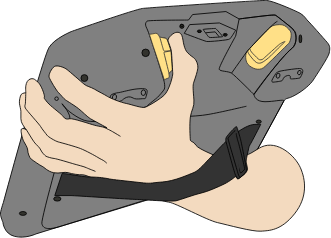
自由驱动
测试自由驱动:
- Unmount tool/s or attachment/s or set the TCP/Payload/CoG according to tool specifications.
-
在自由驱动模式下移动机械臂:
-
在 3PE 示教盒上,快速轻按、松开、再次轻按 3PE 按钮并保持在此位置。
-
- Pull/Push the robot to a horizontally elongated position and release.
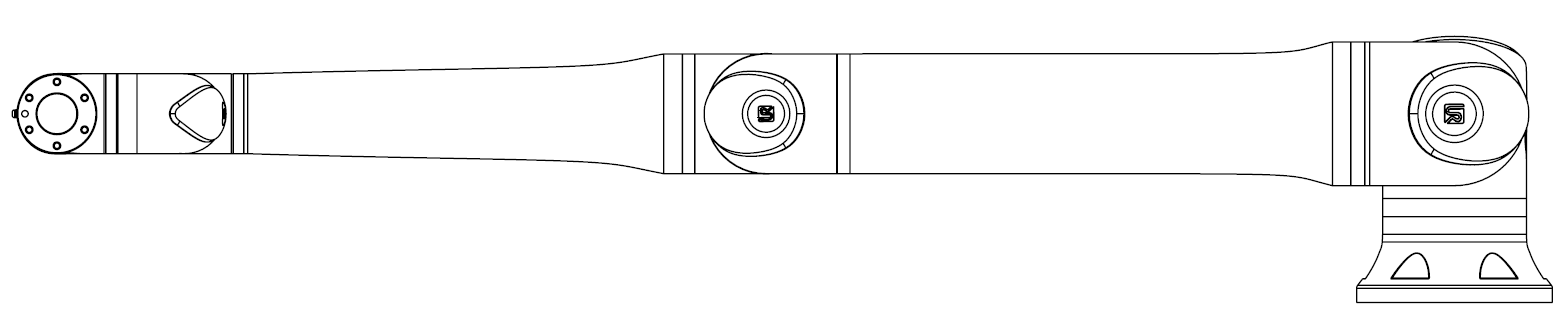
- 验证机械臂能否在没有支撑且未激活自由驱动的情况下保持该位置。