反向驱动
If the robot arm is close to colliding with something, you can use the Backdrive function to move the robot arm to a safe position before (re)initializing it.
To test Backdrive:
- 按下“开”按钮可启动电源。 状态会切换为机器人活跃
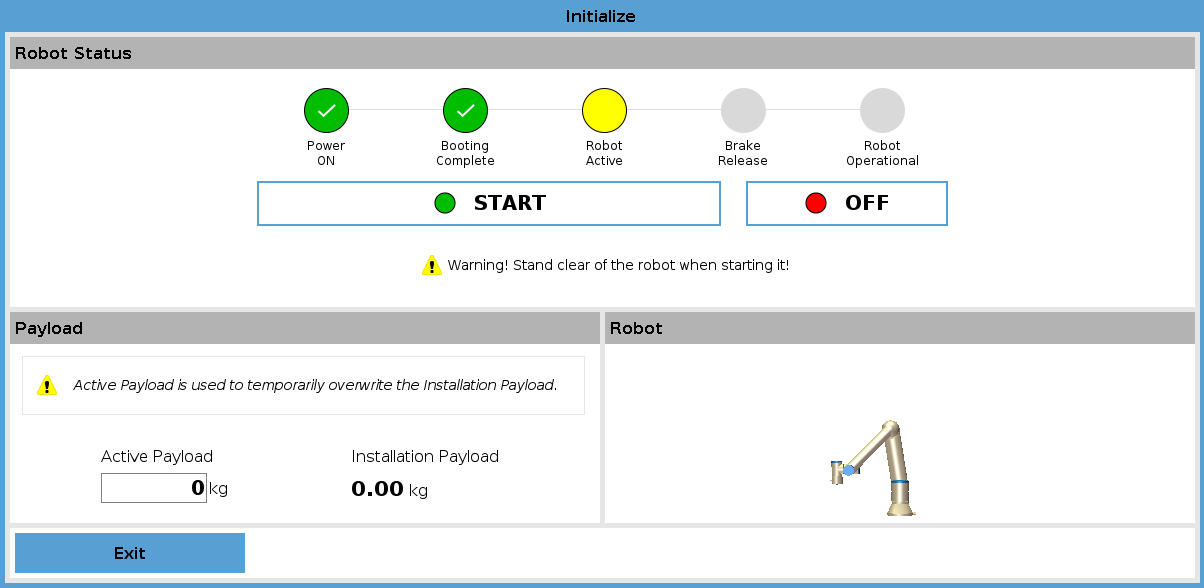
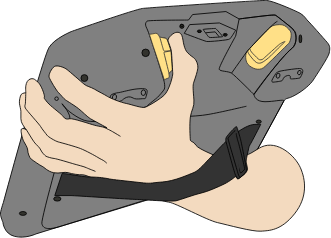
- 按住“自由驱动”。 状态会切换为反向驱动
-
Move robot as in Freedrive. 一旦激活了“自由驱动”按钮,便会在需要的地方释放关节制动器。
The robot arm is “heavy” to move around in Backdrive, so efort is required to move the joints.
Failure to test Backdrive on all joints can lead to loss of functionality.
-
您必须在所有关节上测试“反向驱动”模式。
安全设置
验证机器人安全设置是否符合机器人安装风险评估。
其他安全输入和输出仍在起作用
检查哪些安全输入和输出处于激活状态,并且可以通过 PolyScope 或外部设备触发。
备份数据
See section Backup of data